Generell gilt, dass vor der digitalen Verarbeitung Drucksensoren beschreiben oft Funktionen wie Hysterese (Druck, Temperatur), Linearität, Temperaturkoeffizientund andere charakteristische Parameter in den Produktspezifikationen. Nach der digitalen Verarbeitung beschreiben Drucksensoren oder -transmitter diese Parameterindikatoren jedoch normalerweise nicht mehr, wenn sie die Eigenschaften des Ausgangssignals detailliert beschreiben. Stattdessen liefern sie allgemeine Messgenauigkeitsparameter. Dieser Unterschied liegt nicht daran, dass durch die digitale Verarbeitung Eigenschaften wie Hysterese eliminiert werden können, sondern weil es nach der digitalen Verarbeitung schwierig wird zu unterscheiden, ob bestimmte Eigenschaften wie die Hysterese durch das Messsignal des Sensorelements oder durch die Firmware-Verarbeitung selbst verursacht werden. Daher ist es im Allgemeinen sinnvoller, die durch verursachten Messfehler zu kombinieren Hysterese, Temperatureigenschaften und der Quantisierungsprozess in die endgültigen Messgenauigkeits-, Fehler- und Langzeitstabilitätsspezifikationen des Produkts einfließen.
Katalog
Sensorfehler
Solange es eine Messung gibt, wird es zwangsläufig zu Fehlern kommen. Für bestimmte Anwendungen sind Fehler, auch wenn sie vorhanden sind, in gewissem Sinne relativ. Solange der Fehler innerhalb eines akzeptablen Bereichs liegt, kann er toleriert werden, und professionelle Benutzer folgen im Allgemeinen dem Prinzip von “Genügsamkeit, dann Präferenz” bei der Auswahl von Sensoren. Bei Drucksensoranwendungen sind unter anderem folgende Merkmale von Belang:
- Druckmessbereich: FSO-kPa (Differenzdruck/statischer Druck, Manometerdruck/versiegelter Manometerdruck, absoluter Druck)
· Druckmessfehler: ±kPa
· Messauflösung: kPa/Bit
· Betriebsspannung/-strom
· Lager- und Betriebstemperaturbereich, Messmedium
· Druckreaktionseigenschaften, Wiederholbarkeit, Langzeitstabilität

Unterhalb dieser Druckparameter liegt der Kern oder das Modul des Sensors, das Druck in ein elektrisches Signal umwandeln kann. Es gibt mehrere Prinzipien zur Druckmessung, aber nicht jedes Prinzip kann alle Druckarten und -bereiche abdecken. Zu diesen Grundsätzen gehören:
- Piezoresistiv
- Gesputterter dünner Film
- Silizium resonant
- Kapazitiv
- Wirbelstrom
- Kraftausgleich, Bourdon-Röhre aus geschmolzenem Quarz
- Dehnungsmessstreifen …
Nachfolgend finden Sie eine kurze Fehleranalyse für Drucksensoren basierend auf piezoresistiv Prinzip.
Figur-1: Aus Siliziumchip Zu verschiedene Verpackungsanwendungen von piezoresistive Drucksensoren
In Abbildung 1 sind einige typische Formen aufgeführt, die in verschiedenen Bereichen häufig verwendet werden piezoresistive Drucksensoren von nackten Chips bis hin zu verschiedenen Verpackungsarten. Einige Produkttypen verfügen lediglich über eine Außenverpackung; einige verfügen über analoge Signalausgänge im entsprechenden Bereich, die temperaturkompensiert und zur Austauschbarkeit kalibriert sind; einige verstärken das analoge Signal weiter; und andere führen vor der Ausgabe eine digitale Verarbeitung durch. Es gibt auch Drucktransmitter, die nach digitaler Kalibrierung entsprechende Schnittstellenprotokolle nutzen, die in der Industrie weit verbreitet sind, sowie integrierte Module, die weitere Sensoren wie Temperatur- oder Gassensoren für die Automobil-, Medizin- und andere Industrien einbeziehen. Darüber hinaus nutzen einige Geräte die Druckeigenschaften des zu messenden Mediums, um andere physikalische Größen zu bestimmen – beispielsweise Durchflusssensoren auf Basis von Niederdruck differential pressure sensors in Beatmungsgeräten verwendet.
Im Allgemeinen gilt: Vor der digitalen Verarbeitung Drucksensoren beschreiben oft Funktionen wie Hysterese (Druck, Temperatur), Linearität, Und Temperaturkoeffizient in ihren Spezifikationsabschnitten. Nach der digitalen Verarbeitung beschreiben Drucksensoren oder -transmitter diese Indikatoren jedoch in der Regel nicht, wenn sie die Eigenschaften des Ausgangssignals detailliert beschreiben, sondern stellen sie stattdessen insgesamt zur Verfügung Messgenauigkeit Parameter. Dieser Unterschied liegt nicht daran, dass durch die digitale Verarbeitung Merkmale wie z. B. eliminiert werden können Hysterese, sondern weil es nach der digitalen Verarbeitung schwierig wird zu unterscheiden, ob die Eigenschaften (z. B. Hysterese) durch das Messsignal des Sensorelements oder durch die Firmware-Verarbeitung selbst verursacht werden. Daher sind die Messfehler verursacht durch Hysterese und Temperatureigenschaften werden zusammen mit Quantisierungsfehlern im Allgemeinen in den endgültigen Produktspezifikationen für zusammengefasst Messgenauigkeit, Fehler und Langzeitstabilität.
Bei der digitalen Konditionierung wird die Symmetrie der Sensorbrücke oft selten berücksichtigt. Betrachtet man die Wirkung des versetzt Verteilung am Nulllastpunkt von a piezoresistiver Drucksensor Abhängig von der Verstärkung der Front-End-Verstärkerschaltung sowie den Auswirkungen des nachfolgenden ADC auf die Auflösung des effektiven Signals (FSO) aufgrund von Verstärkungsschwankungen ist ein umfassender Ansatz erforderlich. Nach der digitalen Verarbeitung, sofern nicht erforderlich, erfolgt die versetzt wird ab dem angegebenen Nullpunkt berechnet.
Die analoge Kompensation und Kalibrierung, bevor der ADC an der Verarbeitung teilnimmt, kann die Produktaustauschbarkeit durch Verbesserung der Symmetrie (0-Punkt) erheblich verbessern versetzt Ausgang nähert sich 0V), Temperaturempfindlichkeitund Ausgabekonsistenz. Daher haben beide Methoden ihre Besonderheiten. Bei der anschließenden Fehleranalyse von Drucksensoren werden nur Druckprodukte betrachtet, die einer Temperaturkompensation und Kalibrierung über Widerstandsnetzwerke unterzogen wurden, und nicht solche nach digitaler Verarbeitung.
Basierend auf den Eigenschaften von piezoresistive DrucksensorenDie Fehlerbehandlung wird im Allgemeinen in zwei Arten unterteilt:
- Kompensierbare Fehler (im Allgemeinen durch Temperatureinflüsse verursacht und wiederholbar)
- Nicht entschädigbare Fehler (wird im Allgemeinen durch Druck, Temperatur und Verpackungsstress verursacht und ist nicht wiederholbar)
Selbst für den kompensierbaren Teil des Fehlers können verschiedene Kompensationsmethoden natürlich unterschiedliche Grade der Fehlerbeseitigung erreichen.
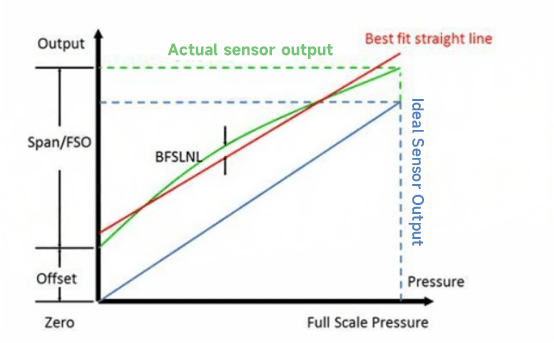
Figur-2: Vergleich der Ausgabe Eigenschaften (Grün) eines piezoresistiven Drucksensors an a behoben Temperatur mit der ideale Drucksensor Ausgabe (Blau)
Für die anschließende Fehleranalyse zeigt Abbildung 2 die allgemeinen Ausgabeeigenschaften von a piezoresistiver Drucksensor. Die in der Abbildung verwendeten Begriffe lauten wie folgt:
- Null: Idealer Referenznullpunkt
- Versatz: Tatsächliche Nulllast-Ausgangsabweichung, d. h. die Ausgangsspannung, wenn eine Nulllast angelegt wird
- BFS: Vollskalenausgang, die Differenz des Ausgangssignals vom Vollskalendruck zum Nullpunkt
- BFSLNL: Nichtlinearität relativ zur Best-Fit-Geraden
Sensoreigenschaften und Fehleranalyse
Als nächstes werfen wir einen detaillierten Blick auf einen Mitteldruck von 40 kPa piezoresistiver Drucksensor von der Marke WF. Nach dem Verpacken, Kalibrieren usw Temperaturkompensation Bei Verwendung eines Druckmoduls aus Edelstahl 316L lauten die Parameter wie folgt:

Die Daten in der Tabelle (z. B. ±1 % FS usw.) stellen normalerweise die endgültige Genauigkeit dar, die „nach Kalibrierung/Kompensation“ erreicht wird., wodurch die meisten wiederholbaren Temperaturfehler, Verstärkungsfehler, Nullpunktabweichung usw. bereits korrigiert wurden. Die tatsächliche „unkalibrierte“ Abweichung berücksichtigt häufig verschiedene Arten von Streuungen, einschließlich anfänglichem Nullpunkt, Empfindlichkeit, Gehäusespannung usw., die sich leicht auf mehr als ±10 % FS summieren können.
Das wahre „unkalibriert„Abweichungen berücksichtigen oft verschiedene Arten von Streuungen, darunter Anfangsnullpunkt, Empfindlichkeit, Gehäusespannung usw., die sich leicht auf mehr als ±10 % FS summieren können.
Daher geben viele Hersteller nur die kalibrierte oder kompensierte Gesamtgenauigkeit an (z. B. 1 % FS, 2 % FS) in ihrem „endgültige Spezifikationen” und geben im endgültigen Produktdatenblatt nicht direkt an, wie viel ±% FS-Fehler Die "original die” könnte haben.
Fehlereinflussfaktoren
Zu den typischen Fehlereinflüssen gehört die Referenz Spannungsfehler, Verstärkerfehler, Sensorfehler, und die Wirkung von Lärm zur Messgenauigkeit.
(1) Referenzspannungsfehler
Die Referenzspannung dient zum Vergleich mit dem tatsächlichen MesswertDaher ist der tatsächliche Wert dieser Referenzspannung sehr wichtig und eine regelmäßige Kalibrierung oder Softwarekalibrierung der Referenzspannung ist erforderlich, um diesen grundlegenden Messfehler zu korrigieren. Ein Temperaturkoeffizient von 100 ppm/°C bei 0 °C bis 25 °C hat einen Fehler von bis zu 2500 ppm oder 0,25 % des gesamten Skalenbereichs.
(2) Verstärkerfehler
Operationsverstärker können aufgrund ihrer phasenverschobenen Nullpunktdrift und aus anderen Gründen Fehler verursachen. Operationsverstärker für den Sensorsignaleingang, der die Messgenauigkeit beeinflusst. Bei Drucksensoren weist beispielsweise ein 20-mV-Vollausschlagsignal einen Offset von 5 % auf, d. h. eine Eingangsvorspannung von 1 mV. Dieser Eingangs-Bias-Fehler kann die Messgenauigkeit direkt verringern. Bei ausreichendem Dynamikbereich des A/D-Wandlers ist es möglich, diesen Fehler mithilfe von Software zu beseitigen.
(3) Sensorfehler
Aufgrund der Verarbeitung ist es unwahrscheinlich, dass Sensoren einen Idealzustand erreichen, und es können Fehler auftreten. Es kann schwierig sein, Sensorfehler zu korrigieren. Beispielsweise ist bei Drucksensoren die Schwankung des Ausgangsskalenfaktors zwischen verschiedenen Geräten in der Anwendung immer noch hoch, selbst wenn sie während des Herstellungsprozesses linear kalibriert werden. Die Referenzspannung des Drucksensors wird normalerweise durch die Erregung erzeugt, die über eine Whiston-Brücke ein proportionales Messverfahren erzeugt, wodurch der Driftfehler bis zu einem gewissen Grad eliminiert wird. Es wird jedoch immer noch eine Vorspannung erzeugt, da die Brücken nicht vollständig symmetrisch zueinander sein können. Am Beispiel des Drucksensors wird der Offset eines Niederdrucksensors verwendet, dessen Vorspannungsfehler größtenteils durch die Brückenasymmetrie verursacht wird.
(4) Lärmeffekte
Rauschen hat viele Quellen, darunter gekoppeltes Rauschen von nahegelegenen Hochgeschwindigkeits-Digitallogikschaltungen, Netzteilen, Lüftermotoren, Magnetventilen und HF-EMI. Rauschen kann durch geeignetes Erdungsdesign, Abschirmungsmethoden und Platinenlayout reduziert werden. Darüber hinaus können Operationsverstärker ausgewählt werden, die das eingebrachte Rauschen minimieren und über eine ausreichende Verstärkungsbandbreite verfügen. Operationsverstärker können anhand der Menge an eingebrachtem Rauschen bewertet werden, die aus Messungen von Signalen über eine uneingeschränkte Bandbreite (große Bandbreite) oder eine definierte Bandbreite ermittelt wird.
A/D-Wandler
Beim Einsatz eines A/D-Wandlers ist das Hintergrundrauschen ein entscheidender Faktor für die erreichbare Messgenauigkeit. Wenn ein Gerät für eine 24-Bit-Auflösung ausgelegt ist, ist die vom Konverter tatsächlich erreichte Genauigkeit aufgrund von Einschränkungen durch Rauschen normalerweise geringer. Dabei ist zwischen dem effektiven Bit und dem sehr rauscharmen Wert zu unterscheiden, wobei die effektive Bitspezifikation aus dem RMS-Wert des Rauschpegels berechnet wird und der sehr rauscharme Wert auf dem Spitze-zu-Spitze-Wert basiert, der typischerweise dem 6,6-fachen des statistischen RMS-Werts entspricht. Daher gibt die Spezifikation für sehr geringes Rauschen die effektive Auflösung des Wandlers an, die bei LSB-Bits über dem Hintergrundrauschen stabil bleibt. Besonderes Augenmerk muss auch auf die Einschränkungen in der Spezifikation gelegt werden, wie z. B. die Referenzspannung und den Eingangsbereich, die von Anwendung zu Anwendung variieren können, und die Versprechen im Datenblatt können erheblich vom tatsächlichen Verhältnis abweichen.
Operationsverstärker
Für einen Verstärker ist es schwierig, gleichzeitig ein geringes Rauschen und eine hohe Verstärkung zu erreichen. Dann ist es notwendig, den Rauschpegel des Verstärkers in den gleichen Bereich wie seinen Fehler zu bringen. Alle Halbleiterverstärker haben 1/f-Rauschen, auch Flickerrauschen genannt, was materialbedingt ein grundsätzliches Phänomen darstellt. Im Gegensatz zur Frequenz nimmt die Geräuschdichte unterhalb eines bestimmten Schallwendepunkts exponentiell zu und wird bei niedrigen Frequenzen sehr groß. Nur wenige Verstärker können diese Kombination aus geringem Rauschen und hohen Verstärkungseigenschaften kostengünstig in einem einzigen Chip realisieren.
Um ein geringes Rauschen und eine hohe Verstärkung zu erreichen, können hybride Mehrfachverstärkerschaltungen entworfen werden, die eine Kombination aus Eingangsverstärkern mit hoher Eingangsimpedanz, Eingangsfehlerkorrekturschaltungen und einem zweiten (oder dritten) Kompensationsverstärker verwenden, um die gewünschte Verstärkung zu erreichen. Verstärker, die sich auf einen Parameter konzentrieren, stellen in anderen Bereichen häufig schwerwiegende Probleme dar.
Letzte Gedanken
Dies ist der Grund, warum wir in praktischen Anwendungen direkt ein kaufen unkalibriertes Bare-Die oder einfach verpackt piezoresistiver Drucksensor und kümmern uns selbst um den Schaltungsentwurf und die Temperaturkompensation, wir stehen möglicherweise vor einem erheblicher Anfangsversatz. Wenn wir jedoch ein kaufen digital kompensiert/kalibriert Drucksensor oder Sender mit eingebauter Kompensation können wir direkt erreichen kleinerer Gesamtfehler (z. B. ±1 % FS), die im Datenblatt angegeben sind.
Die obige Einführung kratzt nur an der Oberfläche der Anwendungen der Drucksensortechnologie. Wir werden weiterhin die verschiedenen Arten von Sensorelementen untersuchen, die in verschiedenen Produkten verwendet werden, wie sie funktionieren und welche Vor- und Nachteile sie haben. Wenn Sie detailliertere Informationen zu den hier besprochenen Themen wünschen, können Sie sich die entsprechenden Inhalte weiter unten in diesem Handbuch ansehen. Wenn Sie unter Zeitdruck stehen, können Sie auch hier klicken, um die Details dieser Leitfäden herunterzuladen PDF -Daten des Luftdrucksensorprodukts.
Weitere Informationen zu anderen Sensortechnologien finden Sie hier Besuchen Sie unsere Sensors -Seite.


