- による WFセンサー
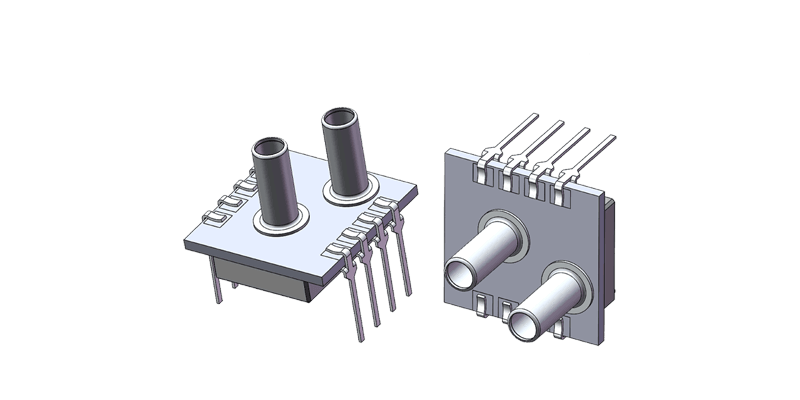
地上での標準大気圧は約 100 kPa で、高度が上がるにつれて低下します。高精度センサーを使用すると、気圧を高度に変換できます。動くプラットフォームは、その速度によって動的な圧力を加えます。全圧サンプルと周囲圧力のみを反映する静圧サンプルを組み合わせることで、高度と速度の両方を導き出すことができます。 UAV 大気測定システムは通常、フロントエンド圧力プローブ、差圧配管、および処理ユニットで構成されます。写真の部品はフロントエンドのサンプリング ポイントとして適しています。金属ポートは直接フローを捕捉するのに適しており、4 パッド レイアウトは SMD の取り付けと電気接続に便利です。ただし、流れの干渉や熱ドリフトを軽減するには、設置方向とエンクロージャのシールドに細心の注意を払う必要があります。
カタログ
1. センサーの配置 & インターフェース
小型航空機では、局所的な乱気流や近くの熱源を避けながら、実際に外気を表す場所にセンサーを設置することから安定した圧力測定が始まります。一般的な手法は、圧力ポートを機首または流線形の表面に配置することです。全圧 (ピトー状) 吸気口は飛行方向に面し、静圧ポートは流れに垂直な表面に配置されます。高ダイナミック、高速プラットフォームの場合、よりクリーンな動圧信号を取得するには、プローブを可能な限り前方に配置する必要があります。ただし、小型ドローンでは、機械的な固定と薄型の筐体が振動と密閉にも対応する必要があります。写真のパッケージ (4 つのはんだパッドを備えた金属圧力ポート) は SMD 実装に適していますが、風食や着氷を防ぐためにマイクロチューブまたは圧力トレースを設計する必要があります。配線に起因するノイズを最小限に抑えるために、電気インターフェースをフィルタリングおよび増幅ステージの近くに配置し、圧力ポートの電気環境が安定するように接地処理に注意してください。
センサーの取り付け位置
取り付け場所を選択するときは、代表的な圧力を与える点を目指してください。機首、胴体前部、翼前縁付近の露出点は、一般に全圧サンプリングに使用されます。静的ポートは、安定した流れが見られ、飛行ベクトルに対して垂直になる表面に配置する必要があります。制御面の後流、プロペラウォッシュ、または大きな熱源の近くにポートを配置することは避けてください。密閉を維持しながら振動に耐えられるようにセンサーを機械的に固定します。低熱膨張材料と柔軟なマウントを使用すると、応力によるオフセットを軽減できます。
エアフロー効果 & 取り付け角度
取り付け角度は、動的圧力を効果的に捕捉する方法と、静的ポートが外乱に対してどの程度耐性があるかに影響します。わずかなずれによって全圧測定値に余分な誤差が生じる可能性があるため、プローブを予想される迎角に合わせて風洞試験または CFD で検証してください。マルチローターでは、ダウンウォッシュは側面の静的ポートに強い影響を与えます。飛行体制全体にわたる圧力偏差を記録し、補正テーブルを作成するか、リアルタイムのフィルタリングを使用して一時的な外乱を補正します。

2. データ計算 & シグナルチェーン
高度と速度を計算するには、ハードウェアとソフトウェアの両方が機能する必要があります。通常、バックエンドは 2 つの圧力チャネルを使用します。1 つは高度用の絶対圧力チャネル、もう 1 つは速度用の差分チャネル (合計から静的圧力を差し引いたもの) です。差圧と速度の関係は流体力学に基づいており、通常は直接的なマッピングで表現されます。実際には、特殊な式ではなく、センサーが線形範囲で動作し、ノイズ フロアが低く、サンプリング帯域幅が動的要件を満たしていることを確認することに重点が置かれています。アナログ フロントエンドには、アンチエイリアス フィルタリング、差動増幅、温度補償が含まれている必要があります。デジタル側はノイズ除去、タイムアライメント、姿勢結合補正を処理する必要があります。重要なのは、予想される最高のダイナミクスの少なくとも 2 倍を超えるようにサンプリング レートを設定し、過渡応答と定常状態の精度のバランスを取る適応フィルタリングを考慮することです。
ハードウェアフィルタリング & サンプリングレート
アナログ フィルタリングでは、ADC の前に高周波ノイズを除去する必要があります。一般的なアプローチは、差動アンプと組み合わせた 2 次ローパス フィルターです。サンプル レートは航空機の動作帯域幅に依存します。多くの場合、マルチローターの垂直帯域幅要件は、はるかに高いレートが必要な高速固定翼航空機よりも低くなります。 ADC の分解能とセンサーの感度によって、解決できる最小の圧力変化が決まります。量子化ノイズが影響を及ぼさないようにコンポーネントを選択します。
数式 & 計算フロー
計算ステップは通常、温度とゼロオフセット補正から始まり、次に絶対圧力を高度に変換します。差圧は動的な圧力を与えます。関連する流体力学関係を適用すると速度が得られます。航空機の姿勢 (ピッチ/ロール) によって、測定された圧力に成分が追加される可能性があることに注意してください。圧力データを姿勢センサーと融合して測定値を一貫した基準フレームに変換し、物理的に意味のある高度と速度の出力を保証します。
3. 校正 & エラー制御
センサーの精度は、派生した飛行パラメータの信頼性に大きく影響します。キャリブレーションには、工場での特性評価と設置後のプラットフォーム レベルのキャリブレーションの 2 つの部分があります。工場出荷時のデータは感度と直線性を提供します。プラットフォームのキャリブレーションは、静的および動的テストを通じて設置固有のエラーを捕捉し、補償係数を生成します。一般的な誤差の原因は、温度ドリフト、ゼロドリフト、機械的応力、圧力経路の漏れなどです。動的誤差の場合は、地上リグと短時間飛行テストを使用して、速度関連の補正を導き出します。静的バイアスの場合は、既知の圧力基準に対してゼロを検証するか、既知の高度のチェックポイントを使用して検証します。時間の経過とともに、セルフチェック ルーチンとテレメトリを実装して、ドリフトを発見できるようにします。
ゼロおよび熱ドリフトの処理
ゼロドリフトは、多くの場合、温度変動や機械的ストレスによって引き起こされます。温度センサーを使用して周囲温度と取り付け温度を記録し、ソフトウェアでリアルタイムの熱補償曲線を適用します。地上チェック中に更新できる、更新可能なゼロ オフセット テーブルを保持します。低熱ドリフト材料やコンパクトな熱経路などのハードウェアの選択も、ドリフトの軽減に役立ちます。
環境 & 動的エラーソース
ウィンドシアー、機体の振動、着氷、汚染はすべて測定値を歪める可能性があります。マルチローターでは、ダウンウォッシュとプロップウォッシュは近くの静的ポートに大きな影響を与えるため、それらの位置が重要になります。高速プラットフォームでは、局所的な圧縮率の影響や衝撃により誤差が生じる可能性があります。これらをシミュレーションとテストで定量化し、システム内の補正をエンコードします。
4. システム統合 & 信頼性の検証
圧力データを飛行制御とナビゲーションに統合するには、堅牢な信号の可用性と冗長性が必要です。統合には、電気インターフェイス、データ プロトコル、姿勢結合、および障害検出ロジックが含まれます。リアルタイムで使用するということは、通信帯域幅と処理遅延を正しく設定し、誤った圧力データによって安全でない制御の決定が引き起こされないように故障モードを定義する必要があることを意味します。検証には、ベンチテスト、地上校正、段階的な飛行テストが含まれます。設置後、低空飛行を行い、GNSS の高度と地上基準と照合してクロスチェックし、その後、さまざまな気象条件と飛行条件を実行して堅牢性をテストします。ミッションクリティカルなプラットフォームの場合は、二重または複数の圧力入力と一貫性チェックを検討してください。
ソフトウェアの冗長性 & 信号チェック
ソフトウェア レベルでは、フィルター技術 (カルマン フィルターが一般的) を使用して圧力チャネルを GNSS および慣性センサーと融合し、入力に適切な重み付けを行います。異常検出を実装して、過渡現象、ドリフト、または切断を特定します。検出すると、システムは車両の安全を保つために代替センサーまたは推定モードにフォールバックする必要があります。
飛行試験検証フロー
段階的なプロセスを使用します。静的キャリブレーションとベースライン ロギングから始めます。次に、短時間、低速、低高度飛行を実行して、気圧から導き出される高度を既知の基準と比較します。最後に、ミッション プロファイル フライトを実行します。各出撃後、圧力、姿勢、GNSS ログを再生し、残差を分析し、パフォーマンスが仕様を満たすまで補正を調整します。
5. 実践的なアドバイス & コンポーネントの選択
センサーを選択するときは、測定範囲、感度、熱ドリフト、パッケージ、インターフェイスのバランスを考慮してください。小型 UAV は多くの場合、ポートが統合されたコンパクトで高速応答のデバイスを好みます。高速プラットフォームでは、範囲と動的直線性が優先されます。長期安定性と再現性が証明されており、現場で簡単に交換できる部品を選択してください。写真のコンポーネントの金属ポートは直接暴露に適していますが、汚染のリスクを軽減するためにマイクロチューブまたは圧力トレースが必要です。ミッション条件下で信頼性の高いパフォーマンスを確保するために、侵入保護、防塵性、耐湿性、動作温度範囲も考慮に入れてください。
推奨されるセンサーの種類 & インターフェース
絶対圧センサーを高度基準として使用し、差圧チャンネルを速度に使用します。デバイスは、統合を容易にするために、クリーンなデジタル出力または低ノイズのアナログ信号を提供する必要があります。高速ダイナミクスを伴うタスクの場合は、高速出力とオンボード温度補償を備えたセンサーを選択して、外部補正の複雑さを軽減します。
メンテナンス & 長期安定性
シール、圧力経路、電気接続を定期的にチェックしてください。地上検査と飛行ログ分析により長期的なドリフトを追跡し、ドリフトが制限を超えた場合にはセンサーを交換または再調整します。モジュラー設計により、フィールドの迅速な交換が容易になり、ダウンタイムが削減されます。
結論
適切なセンサーの選択、慎重な機械レイアウト、厳格な信号処理、徹底した校正体制により、UAV で高度と速度を確実に測定できます。絶対気圧を高度ベースラインとして使用し、合計マイナス静圧から速度を導き出し、これらを姿勢および GNSS データと融合して、全体的な測定の信頼性を高めます。写真の小型 SMD デバイスは、コンパクトなプラットフォームでのフロントエンド サンプリングに適していますが、設置、圧力トレース、および熱管理を適切に処理する必要があります。エンジニアにとって重要なのは、誤差の原因を特定し、設計と検証を通じて誤差の原因を軽減し、生の圧力測定値を信頼できる飛行パラメータに変換することです。
上記の紹介は、圧力センサー技術のアプリケーションの表面をなぞっただけです。私たちは、さまざまな製品で使用されているさまざまなタイプのセンサー素子、それらがどのように機能するか、そしてそれらの長所と短所を引き続き調査していきます。ここで説明する内容についてさらに詳しく知りたい場合は、このガイドの後半にある関連コンテンツをご覧ください。時間がない場合は、ここをクリックしてこのガイドの詳細をダウンロードすることもできます。 空気圧センサー製品PDFデータ。
他のセンサー技術の詳細については、こちらをご覧ください。 センサーページにアクセスしてください。