Catalogare
Questo articolo presenta un approccio applicativo per l'utilizzo di un sensore di pressione assoluta MEMS in dispositivi indossabili per misurare contemporaneamente sia l'altitudine che la profondità di immersione. Utilizzando il sensore WF282A come esempio, è molto piccolo, estremamente preciso e a basso consumo (wfsensors.com). L'articolo analizza i diversi requisiti e le sfide della misurazione dell'altitudine rispetto a quella subacquea, spiega i principali parametri tecnici e i vantaggi del WF282A, tra cui elevata precisione, basso consumo energetico, design dell'imballaggio e dell'interfaccia, ecc. Discute inoltre i punti chiave per la saldatura e il montaggio del sensore nel dispositivo, le procedure di test e la selezione dello strumento prima della produzione di massa e gli algoritmi di commutazione della modalità con compensazione ambientale tra altitudine e modalità di immersione. Destinato agli sviluppatori di dispositivi sportivi indossabili, questo articolo è conciso e di facile lettura e aiuta i lettori a comprendere e applicare la tecnologia dei sensori di pressione assoluta multifunzionali.
Doppia sfida applicativa dei sensori di pressione assoluta MEMS nelle misurazioni di altitudine e immersione
Ambiente di misurazione dell'altitudine
Nell'aria, la misurazione dell'altitudine si basa principalmente sui cambiamenti della pressione atmosferica. All'aumentare dell'altitudine la pressione diminuisce di circa 1 hPa ogni 8 metri, il che significa che un centimetro di variazione di altezza corrisponde solo a circa 0,01 hPa. Pertanto, la misurazione dell'altitudine richiede un sensore con risoluzione e stabilità della temperatura molto elevate. In pratica, i dispositivi spesso calibrano la pressione di riferimento all'avvio o ad un'elevazione nota (utilizzando il GPS o i dati di riferimento) per migliorare la precisione. La temperatura atmosferica e le condizioni meteorologiche causano fluttuazioni di pressione, quindi il sensore deve compensare le variazioni di temperatura e umidità. L'aria è secca, ma i cambiamenti meteorologici improvvisi (come l'inizio di un temporale) possono disturbare le letture. Per gestire movimenti verticali rapidi (come salire le scale), sono necessari anche una frequenza di campionamento e un filtraggio sufficienti per catturare i cambiamenti dinamici di altitudine.
Ambiente di misurazione subacquea
Sott'acqua, il sensore è soggetto a una pressione molto più elevata rispetto all'aria. Secondo la NOAA, la pressione aumenta di circa un’atmosfera ogni 10 metri di profondità dell’acqua. Pertanto, durante l'immersione, la lettura del sensore di pressione assoluta include sia la pressione proveniente dalla profondità dell'acqua che la pressione atmosferica superficiale. Il sensore deve essere sigillato e impermeabile e il suo campo di misurazione deve coprire la profondità desiderata. È possibile registrare una pressione di riferimento P0 in superficie prima dell'immersione e utilizzarla come linea di base per calcolare la profondità durante l'immersione. Inoltre, i cambiamenti di temperatura e salinità dell'acqua influiscono sulla densità dell'acqua e quindi sul calcolo della profondità; questi possono essere corretti con fattori di compensazione. Nelle immersioni lunghe, la deriva del sensore può anche introdurre errori, quindi è necessaria una ricalibrazione periodica o una correzione algoritmica.
Intervallo di misurazione e requisiti di precisione
In modalità altitudine, le variazioni di pressione sono molto piccole. Ad esempio, una differenza di altezza di 3 metri tra i piani corrisponde a soli 30 Pa circa. Il WF282A in modalità ad alta precisione può fornire una risoluzione di ±0,006 hPa (circa 5 cm), soddisfacendo le rigorose esigenze di misurazione dell'altitudine. Le misurazioni della profondità di immersione richiedono un intervallo di pressione molto più ampio: ogni 10 metri di acqua dolce aggiungono circa 1000 hPa. Si noti che la gamma del WF282A è 300–1200 hPa (circa 1100 m di altitudine o 10 m di acqua), quindi non può misurare oltre questa gamma. Anche le variazioni di temperatura influiscono sull'uscita del sensore e devono essere compensate.
Cambio di modalità e sfide di progettazione del sistema
Un'applicazione a doppia modalità richiede che il dispositivo passi dalla modalità altitudine a quella immersione. Ciò significa che il sistema deve rilevare se si è sott'acqua (ad esempio tramite un rapido aumento della pressione oltre il normale intervallo atmosferico) e scegliere il calcolo appropriato. Una strategia semplice consiste nel passare alla modalità immersione quando la pressione supera una soglia (diciamo 1100 hPa) per un periodo prolungato, per evitare falsi allarmi. In modalità altitudine la formula atmosferica standard converte la pressione in altezza, mentre in modalità immersione la formula idrostatica viene utilizzata per calcolare la profondità. La pressione atmosferica di base e la calibrazione differiscono tra le modalità, quindi la progettazione del sistema deve considerare come memorizzare e aggiornare i parametri ambientali (come la pressione superficiale P0) per garantire una commutazione senza interruzioni. È inoltre possibile fornire come backup un interruttore opzionale della modalità manuale.
Principali vantaggi tecnici e specifiche del sensore WF282A
Prestazioni ad alta precisione
Il sensore WF282A offre precisione e risoluzione di misurazione estremamente elevate. In modalità ad alta precisione, la risoluzione della pressione è di ±0,006 hPa (circa 5 cm di altitudine). La sua precisione relativa tipica è di circa ±0,12 hPa e l'errore di non linearità è di circa ±0,06 hPa e fornisce un'uscita digitale a 24 bit per una sensibilità precisa. Una risoluzione così elevata può rilevare cambiamenti di altezza appena percettibili.
Design a basso consumo
Il design a basso consumo del WF282A è ideale per applicazioni portatili. Tipicamente al campionamento a 1 Hz la corrente è di circa 2,7 μA; in modalità ad alta precisione circa 60 μA, in modalità a basso consumo solo 3 μA e corrente di standby inferiore a 1 μA. Queste funzionalità a bassissimo consumo rendono il sensore ideale per i dispositivi alimentati a batteria che necessitano di una lunga autonomia.
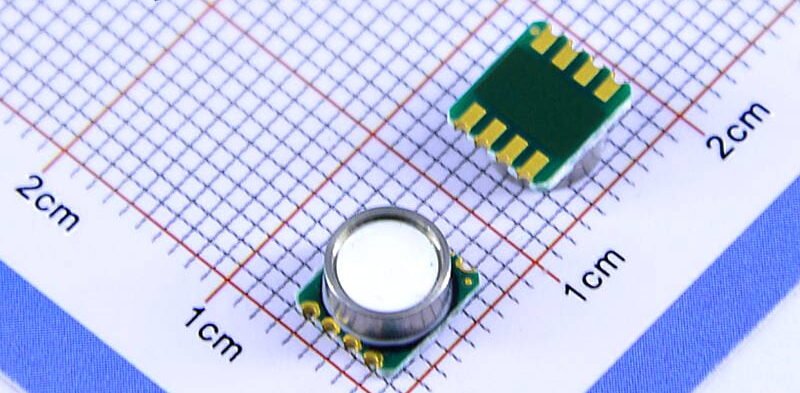
Packaging compatto e opzioni di interfaccia

Il WF282A è disponibile in un minuscolo package LGA da 8 pad che misura appena 2,0×2,5×0,95 mm, rendendolo estremamente compatto. Comunica con un host tramite un'interfaccia digitale I2C o SPI e offre anche un'uscita di interruzione opzionale per semplificare il recupero dei dati. Sulla parte superiore del contenitore è presente un piccolo foro che funge da porta di pressione, che deve essere tenuto libero da ostruzioni durante la progettazione e l'assemblaggio.
Buffer FIFO ed elaborazione dati
Il WF282A include buffer FIFO su chip ed elaborazione dati. Il suo FIFO integrato può memorizzare fino a 32 campioni di misurazione, in modo che l'host possa leggere più valori contemporaneamente e quindi dormire più a lungo per ridurre il consumo energetico complessivo. Il sensore supporta anche il filtraggio digitale configurabile (come i filtri IIR) e le modalità di sovracampionamento, che sopprimono il rumore mantenendo un'elevata frequenza di campionamento. Queste funzioni interne migliorano l'affidabilità della misurazione e semplificano l'elaborazione del software.
Punti chiave per la saldatura e il montaggio del sensore nel dispositivo
Layout dell'impronta e progettazione PCB
Quando si progetta il layout del PCB, seguire l'impronta LGA a 8 pad del WF282A, facendo corrispondere la dimensione del pad al dispositivo. In genere, lasciare un'apertura attorno alla porta di pressione e utilizzare dighe di maschera di saldatura sui cuscinetti per impedire che la saldatura fluisca nella porta. Garantisci inoltre un instradamento uniforme ai pad GND e VCC per ridurre al minimo lo stress termico e puoi aggiungere colate di rame sugli strati interni per una migliore stabilità termica. Evitare di intrappolare sacche d'aria o fosse sotto il sensore, poiché l'aria intrappolata può smorzare la trasmissione della pressione. Assicurarsi che i pad PCB siano piatti in modo che la parte inferiore del sensore stabilisca un buon contatto.
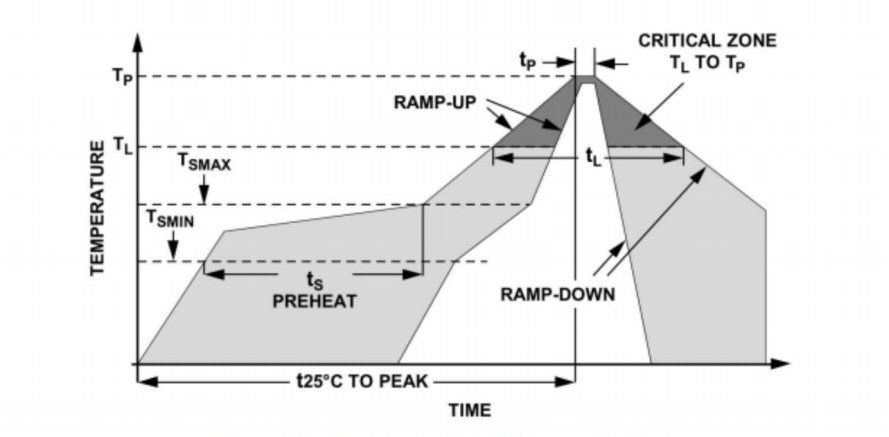
Saldatura e rifusione
Per la saldatura, utilizzare il processo di riflusso senza piombo consigliato: accelerazione a non più di 3°C/s, con un picco intorno a 260°C, e permanenza per 60–150 secondi sopra 217°C. Dopo il riflusso, lasciare raffreddare la tavola in modo naturale ed evitare un raffreddamento rapido. Di solito è necessario un solo ciclo di riflusso per sensore per evitare riscaldamenti ripetuti. Per la rilavorazione, utilizzare rapidamente un saldatore a bassa temperatura per ridurre al minimo il tempo di riscaldamento. Utilizzare le precauzioni ESD per proteggere il sensore e ispezionare i giunti per garantire che non vi siano giunti freddi o ponti di saldatura.
Protezione della porta di pressione
Dopo la saldatura, ispezionare e pulire la porta per garantire che nessuna saldatura o detriti blocchino l'apertura di pressione. Se è necessaria l'impermeabilizzazione, utilizzare un involucro sigillato con una membrana traspirante in modo che la porta del sensore sia esposta all'atmosfera ma non all'acqua. Evitare composti per impregnazione o resine epossidiche che coprirebbero il porto; utilizzare invece O-ring o guarnizioni per sigillare l'alloggiamento, assicurando che la porta rimanga ventilata.
Montaggio e protezione meccanica
Il sensore è tenuto in posizione dai suoi cuscinetti di saldatura e solitamente non necessita di supporto meccanico aggiuntivo. In un dispositivo indossabile, tuttavia, la custodia dovrebbe fornire protezione dagli urti per smorzare gli impatti e le vibrazioni. Se è necessario l'adesivo, applicarlo solo attorno ai bordi ed evitare di coprire la porta di pressione o i cuscinetti. Non montare mai il sensore direttamente su una superficie flessibile.
Procedure di test e strumenti/metodi consigliati prima della produzione di massa
Test funzionali e di calibrazione
Prima della produzione in serie, si consiglia di eseguire verifiche funzionali e test di calibrazione su ciascun lotto di sensori. La procedura tipica prevede: 1) posizionare il sensore alla pressione atmosferica standard (~1013 hPa) e leggere l'output per verificare l'offset; 2) utilizzare una fonte di pressione di precisione o un tester a peso morto per applicare pressioni in più punti (ad esempio, 900 hPa, 1100 hPa) per verificare la linearità e la sensibilità; 3) utilizzare un sistema di test automatizzato per leggere i dati del sensore tramite I2C/SPI in batch e ripetere questi test in diverse condizioni di temperatura per valutare la deriva termica. È inoltre possibile eseguire test sul campo in punti di altitudine noti (come una torre di calibrazione dell'altitudine) per un'ulteriore verifica della precisione.
Test ambientali e di affidabilità
I test dovrebbero includere anche elementi ambientali e di affidabilità: eseguire cicli di temperatura in una camera climatica per valutare la deriva dell’output a temperature estreme; eseguire test di umidità per osservare il comportamento del sensore in ambienti umidi. Condurre test di immersione in acqua o cicli di pressione per verificare la tenuta e la durata, ad esempio posizionando il dispositivo in un serbatoio d'acqua o in una camera a pressione per simulare immersioni ripetute. I test di vibrazione e shock aiutano a valutare l'affidabilità del sensore e della struttura complessiva del dispositivo in condizioni dinamiche.
Strumenti/metodi di test consigliati
Le apparecchiature e i metodi di test consigliati includono:
Calibratore di pressione di precisione: per esempio. Fluke 716 o Mensor CPC100, per fornire pressione dell'aria o dell'acqua programmabile.
Camera termica/umidita: per testare gli effetti della temperatura e dell'umidità sul sensore.
Scheda di test automatizzata: con MCU o FPGA per leggere/scrivere in batch i registri dei sensori tramite I2C/SPI e registrare i dati.
Configurazione del test della pressione dell'acqua: un serbatoio d'acqua a pressione o una camera a pressione per simulare diverse profondità di immersione.
Analizzatore di potenza o oscilloscopio: per monitorare i tempi di campionamento e l'assorbimento di corrente del sensore.
Norme di riferimento: utilizzare sensori di pressione standard calibrati per verificare i risultati della misurazione.
Algoritmi di cambio modalità e fattori di compensazione ambientale
Trigger per il cambio di modalità
È necessario determinare quando passare dalla modalità altitudine alla modalità immersione. Una strategia semplice consiste nel dichiarare un'immersione quando il dispositivo rileva un rapido aumento della pressione oltre il normale intervallo atmosferico (ad esempio, rimanere al di sopra di 1100 hPa). Per evitare falsi allarmi, è possibile richiedere che la pressione superi la soglia per un periodo prolungato oppure utilizzare un sensore di umidità o un altro meccanismo di rilevamento dell'acqua. L'interfaccia utente può anche offrire un cambio di modalità manuale come backup se il rilevamento automatico fallisce.
Algoritmo di calcolo dell'altitudine
In modalità altitudine, utilizzare la formula barometrica per convertire la pressione in altitudine. Una formula comune è h ≈ 44330 × (1 − (P/Po)^0,1903), dove Po è la pressione di riferimento a livello del mare. In pratica, utilizzare la pressione di riferimento misurata all'avvio (o fornita dai dati di altitudine GPS) come Po e applicare la lettura della temperatura del sensore per la compensazione. È possibile utilizzare una media mobile o un filtro di Kalman per uniformare l'output e ridurre il rumore.
Algoritmo di calcolo delle immersioni
In modalità immersione, calcolare la profondità dalla pressione idrostatica: D ≈ (P − P0)/(ρ·g). Qui P0 è la pressione atmosferica in superficie, che può essere registrata all'inizio dell'immersione. La densità ρ dell'acqua dolce è di circa 1000 kg/m³ (un po' più alta per l'acqua di mare) e anche la temperatura influisce sulla densità. Una regola semplificata è che ogni 100 hPa corrispondono a circa 1 metro di profondità d'acqua dolce. Il sistema dovrebbe misurare continuamente la pressione e aggiornare la profondità in tempo reale.
Fattori di compensazione ambientale
Per migliorare la precisione, compensare i fattori ambientali. La lettura della temperatura integrata nel sensore può correggere la deriva della pressione dovuta ai cambiamenti di temperatura. In modalità altitudine, puoi considerare l'effetto dell'umidità sulla densità dell'aria. In modalità immersione, tenere conto dell'effetto della temperatura dell'acqua e della salinità sulla densità (ad esempio, la densità dell'acqua di mare è leggermente superiore a quella dell'acqua dolce). Inoltre, l'applicazione di un filtro passa-basso o la media dei dati di pressione può rimuovere i disturbi a breve termine e stabilizzare i risultati.
Riepilogo
L'utilizzo di un sensore di pressione assoluta MEMS per misurare sia l'altitudine che la profondità di immersione in un unico dispositivo richiede la gestione di diversi intervalli di pressione, esigenze di precisione e algoritmi per ciascuna modalità. Il WF282A, con la sua elevata precisione, basso consumo, contenitore compatto e FIFO integrato, fornisce una solida base hardware per la misurazione a doppia modalità. Nella progettazione, è necessario prestare attenzione al layout e alla saldatura del PCB, mantenendo libera la porta di pressione, oltre a test e calibrazioni approfonditi. Utilizzando la corretta compensazione ambientale (ad esempio per temperatura e densità), il dispositivo può passare senza soluzione di continuità dalla modalità altitudine a quella di immersione e ottenere misurazioni precise.
L'introduzione di cui sopra scalfisce solo la superficie delle applicazioni della tecnologia dei sensori di pressione. Continueremo a esplorare i diversi tipi di elementi sensore utilizzati nei vari prodotti, come funzionano e i loro vantaggi e svantaggi. Se desideri maggiori dettagli su ciò che viene discusso qui, puoi consultare il contenuto correlato più avanti in questa guida. Se hai poco tempo, puoi anche fare clic qui per scaricare i dettagli di queste guide Dati PDF del sensore del sensore di pressione dell'aria.
Per ulteriori informazioni su altre tecnologie di sensori, per favore Visita la nostra pagina dei sensori.