Catalogar
Este artículo presenta un enfoque de aplicación del uso de un sensor de presión absoluta MEMS en dispositivos portátiles para medir la altitud y la profundidad de buceo simultáneamente. Usando el sensor WF282A como ejemplo, es muy pequeño, muy preciso y de bajo consumo (www.wfsensors.com). El artículo analiza los diferentes requisitos y desafíos de la medición de altitud frente a la medición submarina, explica los parámetros técnicos clave y las ventajas del WF282A, incluida la alta precisión, el bajo consumo de energía, el diseño de la interfaz y el empaque, etc. También analiza los puntos clave para soldar y montar el sensor en el dispositivo, los procedimientos de prueba y la selección de instrumentos antes de la producción en masa, y los algoritmos de cambio de modo con compensación ambiental entre los modos de altitud y buceo. Dirigido a desarrolladores de dispositivos deportivos portátiles, este artículo es conciso y fácil de leer, y ayuda a los lectores a comprender y aplicar la tecnología de sensores de presión absoluta multifuncionales.
Desafíos de doble aplicación de los sensores de presión absoluta MEMS en mediciones de altitud y buceo
Entorno de medición de altitud
En el aire, la medición de la altitud se basa principalmente en los cambios de presión atmosférica. A medida que aumenta la altitud, la presión cae aproximadamente 1 hPa cada 8 metros, lo que significa que un centímetro de cambio de altura corresponde a sólo aproximadamente 0,01 hPa. Por lo tanto, la medición de altitud requiere un sensor con muy alta resolución y estabilidad de temperatura. En la práctica, los dispositivos suelen calibrar la presión de referencia al inicio o en una elevación conocida (utilizando GPS o datos de referencia) para mejorar la precisión. La temperatura atmosférica y las condiciones climáticas provocan fluctuaciones de presión, por lo que el sensor debe compensar los cambios de temperatura y humedad. El aire es seco, pero los cambios climáticos repentinos (como la aparición de una tormenta) pueden alterar las lecturas. Para manejar movimientos verticales rápidos (como subir escaleras), también necesita suficiente frecuencia de muestreo y filtrado para capturar los cambios dinámicos de altitud.
Entorno de medición submarina
Bajo el agua, el sensor está sometido a una presión mucho mayor que en el aire. Según la NOAA, la presión aumenta aproximadamente una atmósfera por cada 10 metros de profundidad del agua. Por lo tanto, al bucear, la lectura del sensor de presión absoluta incluye tanto la presión de la profundidad del agua como la presión atmosférica de la superficie. El sensor debe ser sellado y resistente al agua, y su rango de medición debe cubrir la profundidad deseada. Puede registrar una presión de referencia P0 en la superficie antes de bucear y utilizarla como línea de base para calcular la profundidad durante la inmersión. Además, los cambios en la temperatura y la salinidad del agua afectan la densidad del agua y, por tanto, el cálculo de la profundidad; estos pueden corregirse con factores de compensación. En inmersiones largas, la deriva del sensor también puede introducir errores, por lo que es necesaria una recalibración periódica o una corrección algorítmica.
Requisitos de precisión y rango de medición
En el modo de altitud, los cambios de presión son muy pequeños. Por ejemplo, una diferencia de altura de 3 metros entre pisos corresponde a solo unos 30 Pa. El WF282A en modo de alta precisión puede proporcionar una resolución de ±0,006 hPa (aproximadamente 5 cm), satisfaciendo las estrictas necesidades de medición de altitud. Las mediciones de profundidad de buceo requieren un rango de presión mucho más amplio: cada 10 metros de agua dulce añaden unos 1000 hPa. Tenga en cuenta que el rango del WF282A es de 300 a 1200 hPa (aproximadamente 1100 m de altitud o 10 m de agua), por lo que no puede medir más allá de este rango. Los cambios de temperatura también afectan la salida del sensor y deben compensarse.
Cambio de modo y desafíos de diseño de sistemas
Una aplicación de modo dual requiere que el dispositivo cambie entre los modos de altitud y buceo. Esto significa que el sistema debe detectar si está bajo el agua (por ejemplo, por un rápido aumento de presión más allá del rango atmosférico normal) y elegir el cálculo apropiado. Una estrategia sencilla es cambiar al modo de inmersión cuando la presión supera un umbral (digamos 1100 hPa) durante un período prolongado, para evitar activaciones falsas. En el modo de altitud, la fórmula atmosférica estándar convierte la presión en altura, mientras que en el modo de buceo se utiliza la fórmula hidrostática para calcular la profundidad. La presión atmosférica de referencia y la calibración difieren entre los modos, por lo que el diseño del sistema debe considerar cómo almacenar y actualizar los parámetros ambientales (como la presión superficial P0) para garantizar una conmutación perfecta. También se puede proporcionar un interruptor de modo manual opcional como respaldo.
Ventajas técnicas clave y especificaciones del sensor WF282A
Rendimiento de alta precisión
El sensor WF282A ofrece una precisión y resolución de medición extremadamente altas. En modo de alta precisión, su resolución de presión es de ±0,006 hPa (unos 5 cm de altitud). Su precisión relativa típica es de aproximadamente ±0,12 hPa y el error de no linealidad es de aproximadamente ±0,06 hPa y proporciona una salida digital de 24 bits para una sensibilidad fina. Una resolución tan alta puede detectar cambios de altura que apenas se notan.
Diseño de bajo consumo
El diseño de bajo consumo del WF282A es ideal para aplicaciones portátiles. Normalmente, en un muestreo de 1 Hz, la corriente es de aproximadamente 2,7 μA; en modo de alta precisión alrededor de 60 μA, en modo de bajo consumo solo 3 μA y corriente de espera por debajo de 1 μA. Estas características de consumo de energía ultrabaja hacen que el sensor sea ideal para dispositivos que funcionan con baterías y que necesitan un tiempo de funcionamiento prolongado.
Opciones de interfaz y embalaje compacto

El WF282A viene en un pequeño paquete LGA de 8 pads que mide solo 2,0×2,5×0,95 mm, lo que lo hace extremadamente compacto. Se comunica con un host a través de una interfaz digital I2C o SPI e incluso ofrece una salida de interrupción opcional para simplificar la recuperación de datos. Hay un pequeño orificio en la parte superior del paquete que sirve como puerto de presión, que debe mantenerse libre de obstrucciones durante el diseño y montaje.
Búfer FIFO y procesamiento de datos
El WF282A incluye almacenamiento en búfer FIFO y procesamiento de datos en el chip. Su FIFO integrado puede almacenar hasta 32 muestras de medición, por lo que el host puede leer varios valores a la vez y luego dormir más tiempo para reducir el consumo general de energía. El sensor también admite filtrado digital configurable (como filtros IIR) y modos de sobremuestreo, que suprimen el ruido y mantienen una alta frecuencia de muestreo. Estas funciones internas mejoran la confiabilidad de las mediciones y simplifican el procesamiento del software.
Puntos clave para soldar y montar el sensor en el dispositivo
Diseño de huella y diseño de PCB
Al diseñar el diseño de la PCB, siga la huella LGA de 8 pads del WF282A, haciendo coincidir el tamaño del pad con el dispositivo. Por lo general, deje una abertura alrededor del puerto de presión y use protectores de máscara de soldadura en las almohadillas para evitar que la soldadura fluya hacia el puerto. También asegúrese de un enrutamiento uniforme a las almohadillas GND y VCC para minimizar el estrés térmico, y puede agregar vertidos de cobre en las capas internas para una mejor estabilidad térmica. Evite atrapar bolsas de aire o zanjas debajo del sensor, ya que el aire atrapado puede amortiguar la transmisión de presión. Asegúrese de que las almohadillas de la PCB estén planas para que la parte inferior del sensor haga buen contacto.
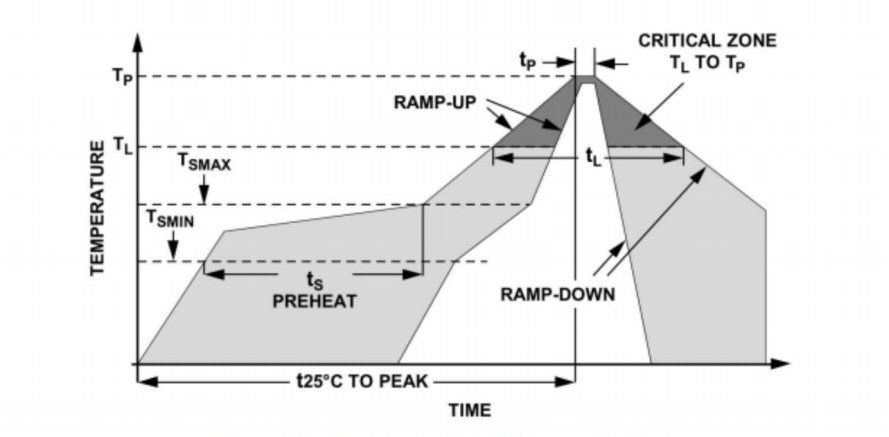
Soldadura y Reflujo
Para soldar, utilice el proceso de reflujo sin plomo recomendado: aumente a no más de 3 °C/s, con un pico alrededor de 260 °C, y permanezca durante 60 a 150 segundos por encima de 217 °C. Después del reflujo, deje que la placa se enfríe naturalmente y evite un enfriamiento rápido. Por lo general, solo se necesita un ciclo de reflujo por sensor para evitar calentamientos repetidos. Para volver a trabajar, utilice rápidamente un soldador de baja temperatura para minimizar el tiempo de calentamiento. Utilice precauciones ESD para proteger el sensor e inspeccione las uniones para asegurarse de que no haya juntas frías ni puentes de soldadura.
Protección del puerto de presión
Después de soldar, inspeccione y limpie el puerto para asegurarse de que no haya soldadura ni residuos bloqueando la abertura de presión. Si es necesaria la impermeabilización, utilice una carcasa sellada con una membrana transpirable para que el puerto del sensor quede expuesto a la atmósfera pero no al agua. Evite compuestos para macetas o epoxis que cubrirían el puerto; en su lugar, utilice juntas tóricas o juntas para sellar la carcasa, asegurando que el puerto permanezca ventilado.
Montaje y protección mecánica
El sensor se mantiene en su lugar mediante sus almohadillas de soldadura y generalmente no necesita soporte mecánico adicional. Sin embargo, en un dispositivo portátil, la carcasa debe proporcionar protección contra golpes para amortiguar los impactos y las vibraciones. Si necesita adhesivo, aplíquelo solo alrededor de los bordes y evite cubrir el puerto de presión o las almohadillas. Nunca monte el sensor directamente sobre una superficie flexible.
Procedimientos de prueba e instrumentos/métodos recomendados antes de la producción en masa
Pruebas funcionales y de calibración
Antes de la producción en masa, se recomienda realizar pruebas de calibración y verificación funcional en cada lote de sensores. El procedimiento típico incluye: 1) colocar el sensor a una presión atmosférica estándar (~1013 hPa) y leer la salida para verificar la compensación; 2) utilizar una fuente de presión de precisión o un probador de peso muerto para aplicar presiones en múltiples puntos (por ejemplo, 900 hPa, 1100 hPa) para verificar la linealidad y la sensibilidad; 3) utilice un sistema de prueba automatizado para leer los datos del sensor a través de I2C/SPI en lotes y repita estas pruebas en diferentes condiciones de temperatura para evaluar la deriva de temperatura. También puede realizar pruebas de campo en puntos de altitud conocidos (como una torre de calibración de altitud) para una mayor verificación de la precisión.
Pruebas ambientales y de confiabilidad
Las pruebas también deben incluir elementos ambientales y de confiabilidad: realizar ciclos de temperatura en una cámara climática para evaluar la deriva de la salida a temperaturas extremas; Realice pruebas de humedad para observar el comportamiento del sensor en ambientes húmedos. Realice pruebas de inmersión en agua o ciclos de presión para verificar el sellado y la durabilidad, por ejemplo, colocando el dispositivo en un tanque de agua o cámara de presión para simular inmersiones repetidas. Las pruebas de vibración y choque ayudan a evaluar la confiabilidad del sensor y la estructura general del dispositivo en condiciones dinámicas.
Instrumentos/métodos de prueba recomendados
Los equipos y métodos de prueba recomendados incluyen:
Calibrador de presión de precisión: p.ej. Fluke 716 o Mensor CPC100, para proporcionar presión de aire o agua programable.
Cámara térmica/humedad: para probar los efectos de la temperatura y la humedad en el sensor.
Tablero de prueba automatizado: con MCU o FPGA para leer/escribir registros de sensores por lotes a través de I2C/SPI y registrar datos.
Configuración de prueba de presión de agua: un tanque de agua a presión o una cámara de presión para simular diferentes profundidades de buceo.
Analizador de potencia u osciloscopio: para monitorear el tiempo de muestreo del sensor y el consumo de corriente.
Estándares de referencia: utilice sensores de presión estándar calibrados para verificar los resultados de la medición.
Algoritmos de cambio de modo y factores de compensación ambiental
Activador para cambio de modo
Debe determinar cuándo cambiar del modo de altitud al modo de buceo. Una estrategia sencilla es declarar una inmersión cuando el dispositivo detecta un aumento rápido de presión más allá del rango atmosférico normal (por ejemplo, mantenerse por encima de 1100 hPa). Para evitar activaciones falsas, puede exigir que la presión supere el umbral durante un tiempo sostenido o utilizar un sensor de humedad u otro mecanismo de detección de agua. La interfaz de usuario también puede ofrecer un cambio de modo manual como respaldo si falla la detección automática.
Algoritmo de cálculo de altitud
En el modo de altitud, utilice la fórmula barométrica para convertir la presión en altitud. Una fórmula común es h ≈ 44330 × (1 − (P/Po)^0.1903), donde Po es la presión de referencia al nivel del mar. En la práctica, utilice la presión de referencia medida al inicio (o proporcionada por los datos de altitud del GPS) como Po y aplique la lectura de temperatura del sensor para compensación. Puede utilizar una media móvil o un filtro de Kalman para suavizar la salida y reducir el ruido.
Algoritmo de cálculo de buceo
En modo buceo, calcule la profundidad a partir de la presión hidrostática: D ≈ (P − P0)/(ρ·g). Aquí P0 es la presión atmosférica en la superficie, que se puede registrar al inicio de la inmersión. La densidad ρ del agua dulce es de aproximadamente 1000 kg/m³ (un poco más alta para el agua de mar), y la temperatura también afecta la densidad. Una regla simplificada es que cada 100 hPa corresponde aproximadamente a 1 metro de profundidad de agua dulce. El sistema debe medir continuamente la presión y actualizar la profundidad en tiempo real.
Factores de compensación ambiental
Para mejorar la precisión, compense los factores ambientales. La lectura de temperatura incorporada del sensor puede corregir la desviación de presión debido a cambios de temperatura. En el modo de altitud, puede considerar el efecto de la humedad en la densidad del aire. En el modo de buceo, tenga en cuenta el efecto de la temperatura y la salinidad del agua sobre la densidad (por ejemplo, la densidad del agua de mar es ligeramente mayor que la del agua dulce). Además, aplicar un filtro de paso bajo o promediar los datos de presión puede eliminar perturbaciones a corto plazo y estabilizar los resultados.
Resumen
El uso de un sensor de presión absoluta MEMS para medir tanto la altitud como la profundidad de inmersión en un solo dispositivo requiere abordar diferentes rangos de presión, necesidades de precisión y algoritmos para cada modo. El WF282A, con su alta precisión, bajo consumo, paquete compacto y FIFO integrado, proporciona una sólida base de hardware para la medición en modo dual. En el diseño, se debe prestar atención al diseño y la soldadura de la PCB, a mantener limpio el puerto de presión y a realizar pruebas y calibración exhaustivas. Al emplear la compensación ambiental correcta (como la temperatura y la densidad), el dispositivo puede cambiar sin problemas entre los modos de altitud y buceo y lograr mediciones precisas.
La introducción anterior sólo toca la superficie de las aplicaciones de la tecnología de sensores de presión. Continuaremos explorando los diferentes tipos de elementos sensores utilizados en diversos productos, cómo funcionan y sus ventajas y desventajas. Si desea obtener más detalles sobre lo que se analiza aquí, puede consultar el contenido relacionado más adelante en esta guía. Si tiene poco tiempo, también puede hacer clic aquí para descargar los detalles de estas guías. Producto del sensor de presión de aire datos PDF.
Para obtener más información sobre otras tecnologías de sensores, por favor Visite nuestra página de sensores.


