Katalog
In diesem Artikel wird ein Anwendungsansatz für die Verwendung eines MEMS-Absolutdrucksensors in tragbaren Geräten zur gleichzeitigen Messung von Höhe und Tauchtiefe vorgestellt. Am Beispiel des WF282A-Sensors ist er sehr klein, hochpräzise und stromsparend (wfsensors.com). Der Artikel analysiert die unterschiedlichen Anforderungen und Herausforderungen der Höhen- und Unterwassermessung und erläutert die wichtigsten technischen Parameter und Vorteile des WF282A, darunter hohe Genauigkeit, geringer Stromverbrauch, Verpackungs- und Schnittstellendesign usw. Außerdem werden wichtige Punkte für das Löten und Montieren des Sensors im Gerät, die Testverfahren und die Instrumentenauswahl vor der Massenproduktion sowie die Modusumschaltalgorithmen mit Umgebungskompensation zwischen Höhen- und Tauchmodus besprochen. Dieser Artikel richtet sich an Entwickler tragbarer Sportgeräte. Er ist prägnant und leserfreundlich und hilft den Lesern, die multifunktionale Absolutdrucksensortechnologie zu verstehen und anzuwenden.
Dual -Anwendungsherausforderungen von MEMS Absolutdrucksensoren in Höhe und Tauchmessungen
Höhenmessumgebung
In der Luft basiert die Höhenmessung hauptsächlich auf Änderungen des atmosphärischen Drucks. Mit zunehmender Höhe sinkt der Druck um etwa 1 hPa pro 8 Meter, was bedeutet, dass ein Zentimeter Höhenänderung nur etwa 0,01 hPa entspricht. Daher erfordert die Höhenmessung einen Sensor mit sehr hoher Auflösung und Temperaturstabilität. In der Praxis kalibrieren Geräte häufig den Referenzdruck beim Start oder auf einer bekannten Höhe (unter Verwendung von GPS oder Referenzdaten), um die Genauigkeit zu verbessern. Atmosphärische Temperatur- und Wetterbedingungen verursachen Druckschwankungen, daher muss der Sensor Temperatur- und Feuchtigkeitsänderungen ausgleichen. Die Luft ist trocken, aber plötzliche Wetteränderungen (z. B. der Beginn eines Sturms) können die Messwerte beeinträchtigen. Um schnelle vertikale Bewegungen (z. B. Treppensteigen) bewältigen zu können, benötigen Sie außerdem eine ausreichende Abtastrate und Filterung, um die dynamischen Höhenänderungen zu erfassen.
Unterwassermessumgebung
Unter Wasser ist der Sensor einem viel höheren Druck ausgesetzt als in der Luft. Laut NOAA steigt der Druck pro 10 Meter Wassertiefe um etwa eine Atmosphäre. Beim Tauchen umfasst der Messwert eines Absolutdrucksensors daher sowohl den Druck aus der Wassertiefe als auch den atmosphärischen Oberflächendruck. Der Sensor muss versiegelt und wasserdicht sein und sein Messbereich muss die gewünschte Tiefe abdecken. Sie können vor dem Tauchgang einen Referenzdruck P0 an der Oberfläche aufzeichnen und diesen als Basislinie zur Berechnung der Tiefe während des Tauchgangs verwenden. Darüber hinaus beeinflussen Änderungen der Wassertemperatur und des Salzgehalts die Wasserdichte und damit die Tiefenberechnung; diese können mit Kompensationsfaktoren korrigiert werden. Bei langen Tauchgängen kann die Sensordrift auch zu Fehlern führen, sodass eine regelmäßige Neukalibrierung oder algorithmische Korrektur erforderlich ist.
Messbereich und Genauigkeitsanforderungen
Im Höhenmodus sind die Druckänderungen sehr gering. Beispielsweise entspricht ein Höhenunterschied von 3 Metern zwischen Stockwerken nur etwa 30 Pa. Der WF282A kann im Hochpräzisionsmodus eine Auflösung von ±0,006 hPa (ca. 5 cm) liefern und erfüllt damit strenge Anforderungen an die Höhenmessung. Tauchtiefenmessungen erfordern einen viel größeren Druckbereich: Alle 10 Meter Süßwasser kommen etwa 1000 hPa hinzu. Beachten Sie, dass der Bereich des WF282A 300–1200 hPa (ca. 1100 m Höhe oder 10 m Wassertiefe) beträgt und daher keine Messungen über diesen Bereich hinaus möglich sind. Temperaturänderungen wirken sich auch auf die Sensorausgabe aus und müssen kompensiert werden.
Moduswechsel und Systemdesignherausforderungen
Bei einer Dual-Mode-Anwendung muss das Gerät zwischen Höhen- und Tauchmodus wechseln. Das bedeutet, dass das System erkennen muss, ob es sich unter Wasser befindet (z. B. durch einen schnellen Druckanstieg über den normalen atmosphärischen Bereich hinaus) und die entsprechende Berechnung auswählen muss. Eine einfache Strategie besteht darin, in den Tauchmodus zu wechseln, wenn der Druck über einen längeren Zeitraum einen Schwellenwert (z. B. 1100 hPa) überschreitet, um Fehlauslösungen zu vermeiden. Im Höhenmodus wandelt die atmosphärische Standardformel den Druck in Höhe um, während im Tauchmodus die hydrostatische Formel zur Berechnung der Tiefe verwendet wird. Der atmosphärische Basisdruck und die Kalibrierung unterscheiden sich zwischen den Modi. Daher muss beim Systemdesign berücksichtigt werden, wie Umgebungsparameter (z. B. der Oberflächendruck P0) gespeichert und aktualisiert werden, um einen nahtlosen Wechsel sicherzustellen. Als Backup kann optional auch ein manueller Modusschalter bereitgestellt werden.
Wichtige technische Vorteile und Spezifikationen des WF282A -Sensors
Hohe Genauigkeitsleistung
Der WF282A-Sensor liefert eine extrem hohe Messgenauigkeit und Auflösung. Im Hochpräzisionsmodus beträgt die Druckauflösung ±0,006 hPa (ca. 5 cm Höhe). Seine typische relative Genauigkeit liegt bei etwa ±0,12 hPa, der Nichtlinearitätsfehler liegt bei etwa ±0,06 hPa und es bietet einen 24-Bit-Digitalausgang für eine feine Empfindlichkeit. Mit dieser hohen Auflösung können Höhenänderungen erkannt werden, die kaum wahrnehmbar sind.
Niedriges Power -Design
Das stromsparende Design des WF282A ist ideal für tragbare Anwendungen. Typischerweise beträgt der Strom bei einer 1-Hz-Abtastung etwa 2,7 μA; im Hochpräzisionsmodus etwa 60 μA, im Low-Power-Modus nur 3 μA und der Standby-Strom unter 1 μA. Diese extrem stromsparenden Funktionen machen den Sensor ideal für batteriebetriebene Geräte, die eine lange Laufzeit benötigen.
Kompakte Verpackungs- und Schnittstellenoptionen

Der WF282A wird in einem winzigen 8-Pad-LGA-Gehäuse mit den Maßen nur 2,0×2,5×0,95 mm geliefert und ist damit äußerst kompakt. Es kommuniziert mit einem Host über eine digitale I2C- oder SPI-Schnittstelle und bietet sogar einen optionalen Interrupt-Ausgang, um den Datenabruf zu vereinfachen. An der Oberseite des Gehäuses befindet sich ein kleines Loch, das als Druckanschluss dient und bei Konstruktion und Montage frei von Verstopfungen gehalten werden muss.
FIFO -Puffer und Datenverarbeitung
Der WF282A umfasst On-Chip-FIFO-Pufferung und Datenverarbeitung. Sein eingebauter FIFO kann bis zu 32 Messproben speichern, sodass der Host mehrere Werte gleichzeitig lesen und dann länger schlafen kann, um den Gesamtstromverbrauch zu senken. Der Sensor unterstützt außerdem konfigurierbare digitale Filterung (z. B. IIR-Filter) und Oversampling-Modi, die Rauschen unterdrücken und gleichzeitig eine hohe Abtastrate beibehalten. Diese internen Funktionen verbessern die Messsicherheit und vereinfachen die Softwareverarbeitung.
Schlüsselpunkte zum Löten und Montieren des Sensors im Gerät
Fußabdrucklayout und PCB -Design
Befolgen Sie beim Entwerfen des PCB-Layouts den 8-Pad-LGA-Footprint des WF282A und passen Sie die Pad-Größe an das Gerät an. Lassen Sie in der Regel eine Öffnung um den Druckanschluss herum und verwenden Sie Lötstopplacke auf den Pads, um zu verhindern, dass Lot in den Anschluss fließt. Stellen Sie außerdem eine gleichmäßige Verlegung zu den GND- und VCC-Pads sicher, um die thermische Belastung zu minimieren. Für eine bessere thermische Stabilität können Sie außerdem Kupferfüllungen auf den Innenschichten anbringen. Vermeiden Sie Lufteinschlüsse oder Gräben unter dem Sensor, da eingeschlossene Luft die Druckübertragung dämpfen kann. Stellen Sie sicher, dass die Leiterplattenpads flach sind, damit die Unterseite des Sensors guten Kontakt hat.
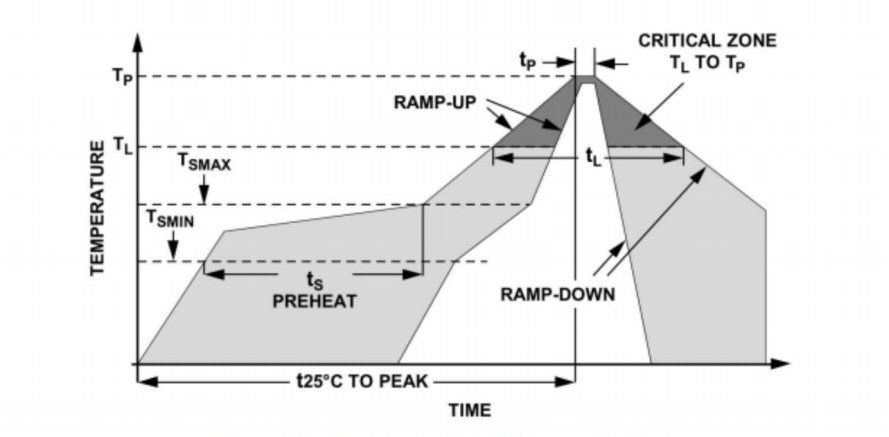
Löten und Reflow
Verwenden Sie zum Löten das empfohlene bleifreie Reflow-Verfahren: Hochfahren mit nicht mehr als 3 °C/s, mit einem Spitzenwert um 260 °C und Verweildauer 60–150 Sekunden über 217 °C. Lassen Sie die Platine nach dem Aufschmelzen auf natürliche Weise abkühlen und vermeiden Sie ein schnelles Abkühlen. Normalerweise ist pro Sensor nur ein Reflow-Zyklus erforderlich, um ein wiederholtes Erhitzen zu vermeiden. Verwenden Sie für Nacharbeiten schnell einen Niedrigtemperatur-Lötkolben, um die Aufheizzeit zu minimieren. Treffen Sie ESD-Vorsichtsmaßnahmen, um den Sensor zu schützen, und überprüfen Sie die Verbindungen, um sicherzustellen, dass keine kalten Verbindungen oder Lötbrücken vorhanden sind.
Druckanschlussschutz
Überprüfen und reinigen Sie nach dem Löten den Anschluss, um sicherzustellen, dass kein Lot oder Schmutz die Drucköffnung blockiert. Wenn eine Wasserdichtigkeit erforderlich ist, verwenden Sie ein abgedichtetes Gehäuse mit einer atmungsaktiven Membran, sodass der Sensoranschluss der Atmosphäre, aber keinem Wasser ausgesetzt ist. Vermeiden Sie Vergussmassen oder Epoxidharze, die den Anschluss verdecken würden. Verwenden Sie stattdessen O-Ringe oder Dichtungen, um das Gehäuse abzudichten und sicherzustellen, dass der Anschluss entlüftet bleibt.
Mechanische Montage und Schutz
Der Sensor wird durch seine Lötpads an Ort und Stelle gehalten und benötigt normalerweise keine zusätzliche mechanische Unterstützung. Bei einem tragbaren Gerät sollte das Gehäuse jedoch einen Stoßschutz bieten, um Stöße und Vibrationen zu dämpfen. Wenn Klebstoff benötigt wird, tragen Sie ihn nur an den Rändern auf und vermeiden Sie es, den Druckanschluss oder die Pads abzudecken. Montieren Sie den Sensor niemals direkt auf einer flexiblen Oberfläche.
Testverfahren und empfohlene Instrumente/Methoden vor der Massenproduktion
Funktions- und Kalibrierungstests
Vor der Massenproduktion wird empfohlen, an jeder Sensorcharge Funktionsüberprüfungs- und Kalibrierungstests durchzuführen. Das typische Verfahren umfasst: 1) Platzieren Sie den Sensor bei normalem Atmosphärendruck (~1013 hPa) und lesen Sie die Ausgabe ab, um den Offset zu überprüfen; 2) Verwenden Sie eine Präzisionsdruckquelle oder einen Druckwaagenprüfer, um Drücke an mehreren Punkten auszuüben (z. B. 900 hPa, 1100 hPa), um die Linearität und Empfindlichkeit zu überprüfen. 3) Verwenden Sie ein automatisiertes Testsystem, um Sensordaten stapelweise über I2C/SPI zu lesen und diese Tests unter verschiedenen Temperaturbedingungen zu wiederholen, um die Temperaturdrift zu beurteilen. Sie können zur weiteren Genauigkeitsüberprüfung auch Feldtests an bekannten Höhenpunkten (z. B. einem Höhenkalibrierungsturm) durchführen.
Umwelt- und Zuverlässigkeitstests
Tests sollten auch Umwelt- und Zuverlässigkeitsaspekte umfassen: Temperaturwechsel in einer Klimakammer durchführen, um die Leistungsdrift bei extremen Temperaturen zu bewerten; Führen Sie Feuchtigkeitstests durch, um das Verhalten des Sensors in feuchten Umgebungen zu beobachten. Führen Sie Wassereintauch- oder Druckwechseltests durch, um die Dichtheit und Haltbarkeit zu überprüfen, indem Sie das Gerät beispielsweise in einen Wassertank oder eine Druckkammer stellen, um wiederholte Tauchgänge zu simulieren. Vibrations- und Schocktests helfen dabei, die Zuverlässigkeit des Sensors und der gesamten Gerätestruktur unter dynamischen Bedingungen zu bewerten.
Empfohlene Testinstrumente/Methoden
Zu den empfohlenen Testgeräten und -methoden gehören:
Präzisionsdruckkalibrator: z.B. Fluke 716 oder Mensor CPC100, um programmierbaren Luft- oder Wasserdruck bereitzustellen.
Thermal-/Feuchtigkeitskammer: um die Auswirkungen von Temperatur und Luftfeuchtigkeit auf den Sensor zu testen.
Automatisierte Testplatine: mit MCU oder FPGA zum stapelweisen Lesen/Schreiben von Sensorregistern über I2C/SPI und zum Aufzeichnen von Daten.
Aufbau von Wasserdruckprüfungen: ein Druckwassertank oder eine Druckkammer zur Simulation verschiedener Tauchtiefen.
Leistungsanalysator oder Oszilloskop: Zur Überwachung des Abtastzeitpunkts und der Stromaufnahme des Sensors.
Referenzstandards: Verwenden Sie kalibrierte Standard-Drucksensoren, um die Messergebnisse zu überprüfen.
Moduswechselalgorithmen und Umgebungskompensationsfaktoren
Auslöser für den Moduswechsel
Sie müssen festlegen, wann vom Höhenmodus in den Tauchmodus gewechselt werden soll. Eine einfache Strategie besteht darin, einen Tauchgang auszurufen, wenn das Gerät einen schnellen Druckanstieg über den normalen atmosphärischen Bereich hinaus erkennt (z. B. ein Bleiben über 1100 hPa). Um Fehlauslösungen zu vermeiden, können Sie festlegen, dass der Druck den Schwellenwert über einen längeren Zeitraum überschreitet, oder einen Feuchtigkeitssensor oder einen anderen Wassererkennungsmechanismus verwenden. Die Benutzeroberfläche kann auch einen manuellen Moduswechsel als Backup bieten, falls die automatische Erkennung fehlschlägt.
Höhenberechnungsalgorithmus
Verwenden Sie im Höhenmodus die barometrische Formel, um den Druck in die Höhe umzurechnen. Eine gängige Formel ist h ≈ 44330 × (1 − (P/Po)^0,1903), wobei Po der Referenzdruck auf Meereshöhe ist. In der Praxis verwenden Sie den beim Start gemessenen Referenzdruck (oder den durch GPS-Höhendaten bereitgestellten Referenzdruck) als Po und wenden zur Kompensation den Temperaturmesswert des Sensors an. Sie können einen gleitenden Durchschnitt oder einen Kalman-Filter verwenden, um die Ausgabe zu glätten und Rauschen zu reduzieren.
Tauchberechnungalgorithmus
Berechnen Sie im Tauchmodus die Tiefe anhand des hydrostatischen Drucks: D ≈ (P − P0)/(ρ·g). Dabei ist P0 der atmosphärische Druck an der Oberfläche, der zu Beginn des Tauchgangs aufgezeichnet werden kann. Die Dichte ρ von Süßwasser beträgt etwa 1000 kg/m³ (bei Meerwasser etwas höher), und auch die Temperatur beeinflusst die Dichte. Eine vereinfachte Regel besagt, dass alle 100 hPa etwa 1 Meter Süßwassertiefe entsprechen. Das System sollte den Druck kontinuierlich messen und die Tiefe in Echtzeit aktualisieren.
Umweltkompensationsfaktoren
Um die Genauigkeit zu verbessern, kompensieren Sie Umgebungsfaktoren. Die integrierte Temperaturmessung des Sensors kann Druckabweichungen aufgrund von Temperaturänderungen korrigieren. Im Höhenmodus können Sie die Auswirkung der Luftfeuchtigkeit auf die Luftdichte berücksichtigen. Berücksichtigen Sie im Tauchmodus den Einfluss der Wassertemperatur und des Salzgehalts auf die Dichte (z. B. ist die Dichte von Meerwasser etwas höher als die von Süßwasser). Darüber hinaus können durch die Anwendung eines Tiefpassfilters oder die Mittelung der Druckdaten kurzfristige Störungen beseitigt und die Ergebnisse stabilisiert werden.
Zusammenfassung
Die Verwendung eines MEMS-Absolutdrucksensors zur Messung von Höhe und Tauchtiefe in einem Gerät erfordert die Berücksichtigung unterschiedlicher Druckbereiche, Genauigkeitsanforderungen und Algorithmen für jeden Modus. Der WF282A bietet mit seiner hohen Genauigkeit, seinem geringen Stromverbrauch, seinem kompakten Gehäuse und dem integrierten FIFO eine solide Hardware-Grundlage für Dual-Mode-Messungen. Beim Design muss auf das PCB-Layout und das Löten geachtet werden, der Druckanschluss frei gehalten werden und gründlich getestet und kalibriert werden. Durch den Einsatz der richtigen Umgebungskompensation (z. B. für Temperatur und Dichte) kann das Gerät nahtlos zwischen Höhen- und Tauchmodus wechseln und präzise Messungen erzielen.
Die obige Einführung kratzt nur an der Oberfläche der Anwendungen der Drucksensortechnologie. Wir werden weiterhin die verschiedenen Arten von Sensorelementen untersuchen, die in verschiedenen Produkten verwendet werden, wie sie funktionieren und welche Vor- und Nachteile sie haben. Wenn Sie detailliertere Informationen zu den hier besprochenen Themen wünschen, können Sie sich die entsprechenden Inhalte weiter unten in diesem Handbuch ansehen. Wenn Sie unter Zeitdruck stehen, können Sie auch hier klicken, um die Details dieser Leitfäden herunterzuladen PDF -Daten des Luftdrucksensorprodukts.
Weitere Informationen zu anderen Sensortechnologien finden Sie hier Besuchen Sie unsere Sensors -Seite.


