Katalog
Denne artikel præsenterer en applikationstilgang til at bruge en MEMS absolut tryksensor i bærbare enheder til at måle både højde og dykkedybde samtidigt. Ved at bruge WF282A-sensoren som eksempel, er den meget lille, meget nøjagtig og laveffekt (wfsensors.com). Artiklen analyserer de forskellige krav og udfordringer ved måling af højde vs. undervandsmåling, forklarer WF282A's vigtigste tekniske parametre og fordele, herunder høj nøjagtighed, lavt strømforbrug, emballage og interfacedesign, osv. Den diskuterer også nøglepunkter for lodning og montering af sensoren i enheden, testprocedurerne og instrumentvalg før masseproduktion, og kompensationsalgoritmeskifte med miljø- og højdeskift. Denne artikel, der er rettet mod udviklere af bærbare sportsenheder, er kortfattet og læservenlig og hjælper læserne med at forstå og anvende multifunktionel absoluttrykssensorteknologi.
Udfordringer med dobbelt anvendelse af MEMS absolutte tryksensorer i højde- og dykningsmålinger
Højdemålingsmiljø
I luften er måling af højde hovedsageligt baseret på atmosfæriske trykændringer. Når højden stiger, falder trykket omkring 1 hPa pr. 8 meter, hvilket betyder, at en centimeters højdeændring kun svarer til omkring 0,01 hPa. Derfor kræver højdemåling en sensor med meget høj opløsning og temperaturstabilitet. I praksis kalibrerer enheder ofte referencetrykket ved opstart eller ved en kendt højde (ved hjælp af GPS eller referencedata) for at forbedre nøjagtigheden. Atmosfæriske temperatur- og vejrforhold forårsager tryksvingninger, så sensoren skal kompensere for temperatur- og luftfugtighedsændringer. Luften er tør, men pludselige vejrændringer (som begyndelsen af en storm) kan forstyrre aflæsninger. For at håndtere hurtige lodrette bevægelser (såsom at gå på trapper), har du også brug for tilstrækkelig samplinghastighed og filtrering til at fange de dynamiske højdeændringer.
Undervandsmålingsmiljø
Under vandet udsættes sensoren for meget højere tryk end i luft. Ifølge NOAA stiger trykket med omkring én atmosfære for hver 10 meter vanddybde. Ved dykning inkluderer en absolut tryksensor-aflæsning således både trykket fra vanddybden og overfladens atmosfæriske tryk. Sensoren skal være forseglet og vandtæt, og dens måleområde skal dække den ønskede dybde. Du kan registrere et referencetryk P0 ved overfladen før dykning og bruge det som basislinje til at beregne dybden under dykket. Derudover påvirker vandtemperatur og saltholdighedsændringer vandtætheden og dermed dybdeberegningen; disse kan korrigeres med kompensationsfaktorer. Over lange dyk kan sensordrift også introducere fejl, så periodisk rekalibrering eller algoritmisk korrektion er nødvendig.
Måleområde og krav til nøjagtighed
I højdetilstand er trykændringerne meget små. For eksempel svarer en højdeforskel på 3 meter mellem etager kun til omkring 30 Pa. WF282A i højpræcisionstilstand kan give en opløsning på ±0,006 hPa (ca. 5 cm), hvilket opfylder strenge højdemålingsbehov. Dykkerdybdemålinger kræver et meget bredere trykområde: hver 10 meter ferskvand tilføjer omkring 1000 hPa. Bemærk, at WF282A's rækkevidde er 300-1200 hPa (ca. 1100 m højde eller 10 m vand), så den kan ikke måle ud over dette område. Temperaturændringer påvirker også sensoroutput og skal kompenseres.
Modusskift og systemdesignudfordringer
En dual-mode-applikation kræver, at enheden skifter mellem højde- og dykningstilstande. Det betyder, at systemet skal detektere, om det er under vand (f.eks. ved en hurtig trykstigning ud over det normale atmosfæriske område) og vælge den passende beregning. En simpel strategi er at skifte til dykketilstand, når trykket overstiger en tærskel (f.eks. 1100 hPa) i en længere periode, for at undgå falske triggere. I højdetilstand konverterer den atmosfæriske standardformel tryk til højde, mens den hydrostatiske formel i dykkertilstand bruges til at beregne dybde. Det atmosfæriske basistryk og kalibrering adskiller sig mellem tilstande, så systemdesignet skal overveje, hvordan miljøparametre (såsom overfladetrykket P0) skal opbevares og opdateres for at sikre problemfri skift. En valgfri manuel tilstandsomskifter kan også leveres som backup.
Vigtigste tekniske fordele og specifikationer for WF282A-sensoren
Ydeevne med høj nøjagtighed
WF282A-sensoren leverer ekstrem høj målenøjagtighed og opløsning. I højpræcisionstilstand er dens trykopløsning ±0,006 hPa (ca. 5 cm højde). Dens typiske relative nøjagtighed er omkring ±0,12 hPa, og ulinearitetsfejl er omkring ±0,06 hPa, og den giver et 24-bit digitalt output for fin følsomhed. En så høj opløsning kan registrere højdeændringer, der knapt er mærkbare.
Lavt strømdesign
WF282A's laveffektdesign er ideelt til bærbare applikationer. Typisk ved 1 Hz sampling er strømmen ca. 2,7 μA; i højpræcisionstilstand omkring 60 μA, i laveffekttilstand kun 3 μA og standbystrøm under 1 μA. Disse funktioner med ultralav strøm gør sensoren fantastisk til batteridrevne enheder, der har brug for lang driftstid.
Kompakt emballage og grænseflademuligheder

WF282A kommer i en lille 8-pads LGA-pakke, der kun måler 2,0×2,5×0,95 mm, hvilket gør den ekstremt kompakt. Den kommunikerer med en vært via en digital I2C- eller SPI-grænseflade og tilbyder endda en valgfri interrupt-output for at forenkle datahentning. Der er et lille hul på toppen af pakken, der tjener som trykport, som skal holdes fri for blokering under design og montering.
FIFO-buffer og databehandling
WF282A inkluderer on-chip FIFO buffering og databehandling. Dens indbyggede FIFO kan gemme op til 32 måleprøver, så værten kan læse flere værdier på én gang og derefter sove længere for at reducere det samlede strømforbrug. Sensoren understøtter også konfigurerbar digital filtrering (såsom IIR-filtre) og oversampling-tilstande, som undertrykker støj og samtidig opretholder en høj samplingsfrekvens. Disse interne funktioner forbedrer målingens pålidelighed og forenkler softwarebehandlingen.
Nøglepunkter for lodning og montering af sensoren i enheden
Footprint Layout og PCB Design
Når du designer PCB-layoutet, skal du følge WF282A's 8-pads LGA-fodaftryk, der matcher pudestørrelsen til enheden. Efterlad typisk en åbning omkring trykporten og brug loddemaskedæmninger på puderne for at forhindre loddemetal i at strømme ind i porten. Sørg også for ensartet routing til GND- og VCC-puderne for at minimere termisk stress, og du kan tilføje kobber på de indre lag for bedre termisk stabilitet. Undgå at fange luftlommer eller skyttegrave under sensoren, da indespærret luft kan dæmpe tryktransmissionen. Sørg for, at PCB-puderne er flade, så sensorens underside har god kontakt.
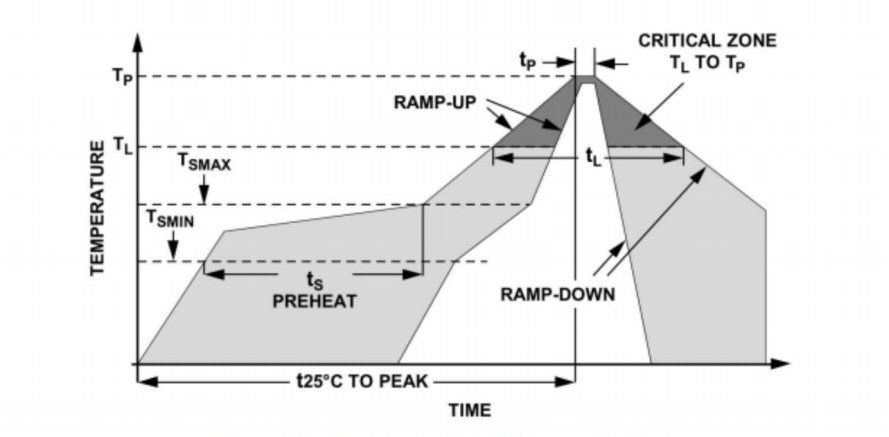
Lodning og Reflow
Til lodning skal du bruge den anbefalede blyfri reflow-proces: rampe op ved ikke mere end 3°C/s, med en top på omkring 260°C, og dvæle i 60-150 sekunder over 217°C. Efter reflow, lad pladen afkøle naturligt og undgå hurtig afkøling. Normalt kræves der kun én reflow-cyklus pr. sensor for at undgå gentagen opvarmning. Til efterbearbejdning skal du bruge en lavtemperatur loddekolbe hurtigt for at minimere opvarmningstiden. Brug ESD-forholdsregler for at beskytte sensoren, og inspicer samlingerne for at sikre, at der ikke er kolde samlinger eller loddebroer.
Trykportbeskyttelse
Efter lodning skal du inspicere og rengøre porten for at sikre, at ingen loddemidler eller snavs blokerer trykåbningen. Hvis der er behov for vandtætning, skal du bruge et forseglet kabinet med en åndbar membran, så sensorporten udsættes for atmosfæren, men ikke for vand. Undgå indkapsling sammensætninger eller epoxy, der ville dække porten; brug i stedet O-ringe eller pakninger til at forsegle huset og sikre, at porten forbliver ventileret.
Mekanisk montering og beskyttelse
Sensoren holdes på plads af sine loddepuder og behøver normalt ingen ekstra mekanisk støtte. I en bærbar enhed bør kabinettet dog give stødbeskyttelse for at dæmpe stød og vibrationer. Hvis der er behov for klæbemiddel, påfør det kun rundt om kanterne og undgå at dække trykporten eller puderne. Monter aldrig sensoren direkte på en fleksibel overflade.
Testprocedurer og anbefalede instrumenter/metoder før masseproduktion
Funktions- og kalibreringstest
Før masseproduktion anbefales det at udføre funktionelle verifikation og kalibreringstest på hver batch af sensorer. Den typiske procedure omfatter: 1) anbring sensoren ved standard atmosfærisk tryk (~1013 hPa) og aflæs output for at kontrollere offset; 2) brug en præcisionstrykkilde eller dødvægtstester til at påføre tryk på flere punkter (f.eks. 900 hPa, 1100 hPa) for at verificere linearitet og følsomhed; 3) brug et automatiseret testsystem til at læse sensordata via I2C/SPI i batch og gentag disse test under forskellige temperaturforhold for at vurdere temperaturdrift. Du kan også udføre felttest ved kendte højdepunkter (såsom et højdekalibreringstårn) for yderligere nøjagtighedsbekræftelse.
Miljø- og pålidelighedstest
Test bør også omfatte miljø- og pålidelighedselementer: lav temperaturcyklus i et klimakammer for at evaluere outputdrift ved ekstreme temperaturer; udføre fugttest for at observere sensorens adfærd i fugtige omgivelser. Udfør vandnedsænkning eller trykcyklustest for at verificere forsegling og holdbarhed, for eksempel ved at placere enheden i en vandtank eller et trykkammer for at simulere gentagne dyk. Vibrations- og stødtest hjælper med at evaluere pålideligheden af sensoren og den overordnede enhedsstruktur under dynamiske forhold.
Anbefalede testinstrumenter/-metoder
Anbefalet testudstyr og metoder omfatter:
Præcisionstrykkalibrator: f.eks. Fluke 716 eller Mensor CPC100, for at give programmerbart luft- eller vandtryk.
Termisk/fugtighedskammer: for at teste effekten af temperatur og fugtighed på sensoren.
Automatiseret testtavle: med MCU eller FPGA til batchlæse/skrive sensorregistre via I2C/SPI og optage data.
Opsætning af vandtrykstest: en trykvandsbeholder eller trykkammer til at simulere forskellige dykkerdybder.
Effektanalysator eller oscilloskop: for at overvåge sensorens samplingstidspunkt og strømtræk.
Referencestandarder: brug kalibrerede standardtryksensorer til at verificere måleresultater.
Modusskiftealgoritmer og miljøkompensationsfaktorer
Trigger for tilstandsskift
Du skal bestemme, hvornår du skal skifte fra højdetilstand til dykkertilstand. En simpel strategi er at erklære et dyk, når enheden registrerer en hurtig trykstigning ud over det normale atmosfæriske område (for eksempel ved at holde sig over 1100 hPa). For at undgå falske triggere kan du kræve, at trykket overskrider tærsklen i længere tid eller bruge en fugtighedssensor eller anden vanddetektionsmekanisme. Brugergrænsefladen kan også tilbyde en manuel tilstandsomskifter som backup, hvis den automatiske registrering mislykkes.
Algoritme for højdeberegning
I højdetilstand skal du bruge den barometriske formel til at konvertere tryk til højde. En almindelig formel er h ≈ 44330 × (1 − (P/Po)^0,1903), hvor Po er havniveaureferencetrykket. I praksis skal du bruge referencetrykket målt ved opstart (eller leveret af GPS-højdedata) som Po, og anvende sensorens temperaturaflæsning til kompensation. Du kan bruge et glidende gennemsnit eller Kalman-filter til at udjævne output og reducere støj.
Algoritme til beregning af dykning
I dykkertilstand beregnes dybden ud fra hydrostatisk tryk: D ≈ (P − P0)/(ρ·g). Her er P0 det atmosfæriske tryk ved overfladen, som kan registreres ved starten af dykket. Tætheden ρ af ferskvand er omkring 1000 kg/m³ (lidt højere for havvand), og temperaturen påvirker også tætheden. En forenklet regel er, at hver 100 hPa svarer til cirka 1 meter ferskvandsdybde. Systemet skal løbende måle tryk og opdatere dybden i realtid.
Miljøkompensationsfaktorer
For at forbedre nøjagtigheden skal du kompensere for miljøfaktorer. Følerens indbyggede temperaturaflæsning kan korrigere for trykdrift på grund af temperaturændringer. I højdetilstand kan du overveje virkningen af fugt på luftens tæthed. I dykkertilstand skal du tage højde for virkningen af vandtemperatur og saltholdighed på tætheden (for eksempel er havvandsdensiteten lidt højere end ferskvand). Derudover kan anvendelse af et lavpasfilter eller gennemsnitsberegning af trykdata fjerne kortvarige forstyrrelser og stabilisere resultaterne.
Oversigt
Brug af en MEMS absolut tryksensor til at måle både højde og dykkedybde i én enhed kræver, at man adresserer forskellige trykområder, nøjagtighedsbehov og algoritmer for hver tilstand. WF282A giver med sin høje nøjagtighed, lave effekt, kompakte pakke og indbyggede FIFO et stærkt hardwaregrundlag for dual-mode måling. Ved design skal der lægges vægt på PCB-layout og lodning, at holde trykporten fri, og grundig test og kalibrering. Ved at anvende den korrekte miljøkompensation (såsom for temperatur og tæthed), kan enheden problemfrit skifte mellem højde- og dykningstilstande og opnå præcise målinger.
Ovenstående introduktion ridser kun overfladen af anvendelserne af tryksensorteknologi. Vi vil fortsætte med at udforske de forskellige typer sensorelementer, der bruges i forskellige produkter, hvordan de virker, og deres fordele og ulemper. Hvis du gerne vil have flere detaljer om, hvad der diskuteres her, kan du tjekke det relaterede indhold senere i denne vejledning. Hvis du er presset på tid, kan du også klikke her for at downloade detaljerne i denne guide Lufttrykssensor Produkt PDF -data.
For mere information om andre sensorteknologier, venligst Besøg vores Sensors -side.