- Av WFsensorer
Det här stycket fokuserar på de typer av fel som påverkar sensornoggrannheten och de praktiska tekniska svaren. Syftet är att hjälpa dig att snabbt upptäcka systemflaskhalsar och välja fungerande korrigeringar. Genom att välja rätt hårdvara, optimera systemdesign och rensa upp signalkedjan kan du märkbart förbättra stabiliteten och repeterbarheten för högprecisionstrycksensorer i riktiga produkter.
Katalog
1. Övergripande ram för sensornoggrannhetsfel
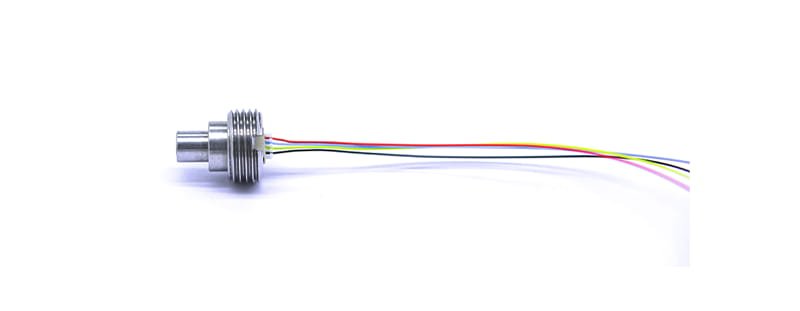
I ett mätsystem kommer fel sällan från en plats - det är summan av bidrag från flera delsystem. Du kan tänka på övergripande noggrannhet som den kombinerade effekten av referenskällan, front-end-förstärkning, själva avkänningselementet, miljökoppling och det digitala konverteringssteget. När du designar, ta en systemvy: ett offset- eller förstärkningsfel vid en punkt kommer att förstärkas, filtreras och konverteras nedströms, vilket ofta förvandlar en liten hårdvarufel till ett märkbart utmatningsfel. Genom att kvantifiera hur känslig systemets utdata är för varje element kan du fokusera resurserna där de köper mest förbättring. Den avbildade sensorkontakten - ett litet metallhölje - är ett bra exempel: dess förpackning och montering påverkar termisk och mekanisk koppling, vilket i sin tur förändrar hur sensorn reagerar.
Felklassificering och påverkan på systemnivå
Fel delas i allmänhet in i fyra typer: offset (bias), skalfel (förstärkning), olinjäritet och brus. Offset förskjuter hela läsningen; skalfel ändrar proportionella avläsningar över intervallet; olinjäritet visar sig olika i olika delar av intervallet; och brus ställer in den minsta detekterbara förändringen inom en given bandbredd. Analys på systemnivå innebär att ge varje felkälla en känslighetskoefficient, bygga en felbudget och i värsta fall stapla dessa bidrag. Det ger dig bevis för att bestämma var du ska förbättra hårdvaran, eller var mjukvarukompensation kommer att vara tillräcklig.
2. Grundläggande inverkan av kraft och referenser på noggrannhet
Referenskällor är grundläggande eftersom mätningen i slutändan jämförs med den referensen. En noggrant utformad referens minskar drastiskt temperaturinducerad drift och långvarig bias. Till exempel, i vanliga driftsområden, kan en liten temperaturkoefficient i referensen översättas till en betydande del av fullskalefel. Så välj lågdrift, lågbrus referensdelar och var uppmärksam på layouten: frånkoppling, jordning och skärmningsmaterial. På firmwaresidan kan periodiska kontroller eller mjukvarubaserade kalibreringsrutiner korrigera långsamma drifter i referensen över tid.
Hur utbudskvalitet och referensdesign bidrar till mätbias
En stabil strömförsörjning kräver låg utgångsimpedans och lämplig frånkoppling, speciellt för småsignalmätningar där transienta spänningssteg blir mätfel. Ge lokal frikoppling vid känsliga noder och överväg stegvis reglering och filtrering. I utrymmesbegränsade enheter, håll analoga referenser fysiskt åtskilda från bullriga digitala kopplingsområden för att undvika koppling. Bra PCB-layout och effektdomänseparation minskar injicerade fel avsevärt.
3. Brus och drift i förstärkare och småsignalkedjan
I den lilla signalkedjan ställer förstärkarvalet till stor del det uppnåbara signal-brusförhållandet. Förstärkaroffset och drift omvandlas till motsvarande mätfel vid ingången — i små fullskaliga system kan en liten ingångsoffset betyda flera procents fel vid utgången. Att uppnå lågt brus och högt dynamiskt omfång är en balansgång: enhetsval och topologi har betydelse. Praktiskt taget kommer du att använda ett front-end-steg med låg brus och hög ingångsimpedans och följa med förstärkningssteg för att nå den nödvändiga totala förstärkningen samtidigt som bandbredden är tillräcklig för mätfrekvenserna.
Design avvägningar för förstärkarkretsar
Enstaka förstärkare levererar sällan både mycket lågt brus och mycket hög förstärkning. En flerstegsmetod fungerar vanligtvis bäst: en ingångsförstärkare med låg brus bevarar den svaga signalen, medan senare steg lägger till kontrollerad förstärkning och drivförmåga. Filter måste väljas för att matcha samplingsfrekvenser så att du undviker alias och bevarar signalen av intresse. Balansera noggrant ingångsimpedans, brusprestanda och DC-offset när du väljer delar eller topologier.
4. Tillverknings- och monteringsgränser för avkänningselementet
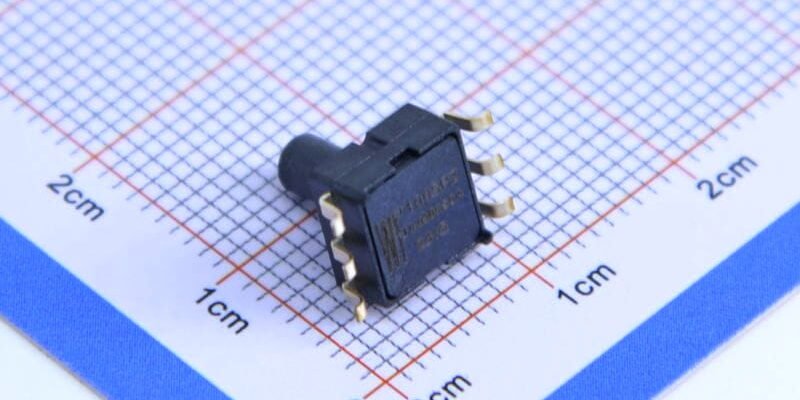
Fel från själva avkänningselementet - tillverkningstoleranser, materialvariationer och monteringsspänningar - är ofta svårast att ta bort. Även med fabrikslinjärisering varierar utsignalerna märkbart från enhet till enhet. Många trycksensorer använder en bryggexcitering för att skapa en proportionell utgång; som hjälper till att minska driften, men bryggasymmetri och monteringsspänning ger fortfarande förskjutningar. Den lilla metallanslutna kontakten som visas på bilden är praktisk för trånga installationer men ger termiska banor och spänningsöverföring som kan påverka avläsningar; så tänk på mekanisk isolering och noggrann termisk design under produktintegrering.
Hur mekanik och installation påverkar avläsningar lokalt
Monteringsplats och mekanisk anslutning ändrar lokal temperaturfördelning och spänningstillståndet runt avkänningselementet, vilket orsakar statiska förskjutningar eller förändrad olinjäritet. Bra mekanisk design syftar till att minimera krafter som överförs till den känsliga kärnan och, där det behövs, använder flexibla monteringar eller kompensationsfunktioner för att isolera oönskade påkänningar.
5. Gränser för A/D-konvertering och digitalisering
A/D-steget dikterar ofta den användbara upplösningen: en enhet med många bitar kan vara brusbegränsad långt under den nominella upplösningen. Skilj mellan nominella bitar och effektiva bitar - de senare beror på RMS-brusgolvet. Topp-till-topp-brus är statistiskt relaterat till RMS-värdet, så du bör utvärdera omvandlare på brus inom den faktiska applikationens bandbredd. Var också försiktig: databladsförhållandena (referensspänning, ingångsintervall, bandbredd) kan skilja sig från din produkts förhållanden; mät den effektiva upplösningen i den verkliga installationen, inte bara på papper.
Mätstrategier på systemnivå och felkompensationsmetoder
I den digitala domänen kan du använda filtrerings-, medelvärdes- och kalibreringstabeller för att minska kvarvarande fel. Filtrering byter bandbredd för förbättrad SNR; medelvärde tar bort slumpmässigt brus men kan smeta ut tidsdomänfunktioner. Programvarukalibrering kan korrigera statisk offset och skala, men den kompenserar inte helt dynamiska fel orsakade av temperaturförskjutningar eller mekaniska påfrestningar. En kombinerad hård- och mjukvara är därför den mest robusta.
Slutsats
Att öka noggrannheten är en uppgift på systemnivå. Var uppmärksam på referenser och tillbehör, förstärkarens frontände, avkänningselementet och dess mekaniska förpackning och A/D-steget. För den lilla metallinfattade kontakten som visas, var särskilt försiktig med mekaniska och termiska banor. När du väljer förstärkare och omvandlare, gör brus och dynamiskt omfång till dina primära kriterier. Bygg en felbudget som kvantifierar varje delsystems bidrag så att du kan prioritera förbättringar där de betyder mest. En blandning av hårdvarudesign med låg brus och riktad digital kompensation kommer att märkbart öka prestandan på fältet högprecisionstrycksensorer och högupplösta trycksensorer — och vid användning oljefyllda trycksensormoduler eller diffusionssilikonoljefyllda kärnor, en integrerad systemvy och noggrann implementering är avgörande.
Ovanstående introduktion repar bara ytan på tillämpningarna av trycksensorteknologi. Vi kommer att fortsätta att utforska de olika typerna av sensorelement som används i olika produkter, hur de fungerar och deras fördelar och nackdelar. Om du vill ha mer information om vad som diskuteras här kan du kolla in det relaterade innehållet längre fram i den här guiden. Om du är tidspressad kan du också klicka här för att ladda ner detaljerna i denna guide Lufttryckssensor Produkt PDF -data.
För mer information om andra sensorteknologier, vänligen Besök vår Sensors -sida.