Em geral, antes do processamento digital, sensores de pressão muitas vezes descrevem características como histerese (pressão, temperatura), Linearidade, coeficiente de temperaturae outros parâmetros característicos nas especificações do produto. No entanto, após o processamento digital, os sensores ou transmissores de pressão normalmente não descrevem mais esses indicadores de parâmetros ao detalhar as características do sinal de saída; em vez disso, eles fornecem parâmetros gerais de precisão de medição. Essa diferença não ocorre porque o processamento digital pode eliminar características como a histerese, mas porque após o processamento digital fica difícil distinguir se certas características como a histerese são causadas pelo sinal de medição do elemento sensor ou pelo próprio processamento do firmware. Portanto, geralmente é mais razoável combinar os erros de medição causados por histerese, características de temperatura e o processo de quantização na precisão da medição final, erro e especificações de estabilidade de longo prazo do produto.
Catálogo
Erros do sensor
Enquanto houver medição, inevitavelmente haverá erros. Para aplicações específicas, mesmo que existam erros, eles são relativos em certo sentido. Contanto que o erro esteja dentro de uma faixa aceitável, ele pode ser tolerado e os usuários profissionais geralmente seguem o princípio de “suficiência, então preferência” ao selecionar sensores. Em aplicações de sensores de pressão, as características preocupantes incluem, mas não estão limitadas a, as seguintes:
- Faixa de medição de pressão: FSO-kPa (pressão diferencial/pressão estática, pressão manométrica/pressão manométrica selada, pressão absoluta)
· Erro de medição de pressão: ±kPa
· Resolução de medição: kPa/bit
· Tensão/corrente operacional
· Faixa de temperatura de armazenamento e operação, meio de medição
· Características de resposta à pressão, repetibilidade, estabilidade a longo prazo

Abaixo desses parâmetros de pressão está o núcleo ou módulo do sensor que pode converter a pressão em um sinal elétrico. Existem vários princípios para medir a pressão, mas nem todos os princípios podem abranger todos os tipos e faixas de pressão. Esses princípios incluem:
- Piezoresistivo
- Filme fino pulverizado
- Silício Ressonante
- Capacitivo
- Corrente parasita
- Equilíbrio de força, tubo Bourdon de quartzo derretido
- Medidor de tensão …
Abaixo está uma breve análise de erros para sensores de pressão com base no piezoresistivo princípio.
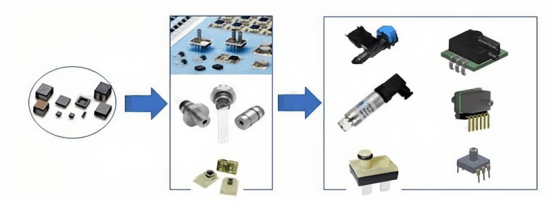
Figura-1: De chip de silício para diversas aplicações de embalagens de sensores de pressão piezoresistivos
Na Figura 1, estão listados vários formulários típicos que são amplamente utilizados em vários campos com base em sensores de pressão piezoresistivos desde matrizes simples até diversos tipos de embalagens. Alguns tipos de produtos possuem apenas embalagem externa; alguns possuem saídas de sinal analógico dentro da faixa correspondente que são compensadas em temperatura e calibradas para intercambialidade; alguns amplificam ainda mais o sinal analógico; e outros realizam processamento digital antes da saída. Existem também transmissores de pressão que, após calibração digital, utilizam protocolos de interface correspondentes amplamente aplicados na indústria, bem como módulos integrados que incluem outros sensores, como sensores de temperatura ou gás para indústrias automotivas, médicas e outras. Além disso, alguns dispositivos utilizam as características de pressão do meio que está sendo medido para determinar outras grandezas físicas – por exemplo, sensores de fluxo baseados em baixa pressão. sensores de pressão diferencial usado em ventiladores.
De modo geral, antes do processamento digital, sensores de pressão muitas vezes descrevem características como histerese (pressão, temperatura), Linearidade, e coeficiente de temperatura em suas seções de especificações. Após o processamento digital, no entanto, os sensores ou transmissores de pressão normalmente não descrevem esses indicadores ao detalhar as características do sinal de saída, mas em vez disso fornecem informações gerais precisão de medição parâmetros. Essa diferença não ocorre porque o processamento digital pode eliminar características como histerese, mas porque se torna difícil, após o processamento digital, distinguir se as características (por exemplo, histerese) são causadas pelo sinal de medição do elemento sensor ou pelo próprio processamento do firmware. Portanto, os erros de medição causados por histerese e as características de temperatura, juntamente com erros de quantização, são geralmente combinadas nas especificações do produto final para precisão de medição, erro e estabilidade a longo prazo.
O condicionamento digital raramente aborda a simetria da ponte do sensor. Se considerarmos o efeito do desvio distribuição no ponto de carga zero de um sensor de pressão piezoresistente no ganho do circuito de amplificação front-end, bem como no impacto do ADC subsequente na resolução do sinal efetivo (FSO) devido a variações de ganho, é necessária uma abordagem abrangente. Após o processamento digital, a menos que necessário, o desvio é calculado a partir do ponto zero especificado.
A compensação e calibração analógica, antes do ADC participar do processamento, podem melhorar significativamente a intercambialidade do produto, melhorando a simetria (0 ponto desvio saída se aproximando de 0V), sensibilidade à temperaturae consistência de saída. Portanto, ambos os métodos têm características próprias. Na análise de erros subsequente dos sensores de pressão, serão discutidos apenas produtos de pressão que passaram por compensação de temperatura e calibração usando redes de resistores, e não aqueles após processamento digital.
Com base nas características sensores de pressão piezoresistivos, o tratamento do erro é geralmente dividido em dois tipos:
- Erros compensáveis (geralmente causados por efeitos de temperatura e são repetíveis)
- Erros não compensáveis (geralmente causados por pressão, temperatura e estresse de embalagem e não são repetíveis)
É claro que, mesmo para a parte compensável do erro, diferentes métodos de compensação podem atingir graus variados de cancelamento de erro.
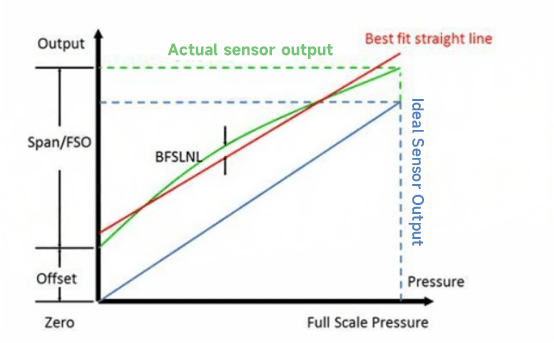
Figura-2: Comparação da saída características (verde) de um sensor de pressão piezoresistivo em um fixo temperatura com o sensor de pressão ideal saída (azul)
Para a análise de erro subsequente, a Figura 2 mostra as características gerais de saída de um sensor de pressão piezoresistente. Os termos usados na figura são os seguintes:
- Zero: Ponto zero de referência ideal
- Desvio: Desvio real de saída com carga zero, ou seja, a tensão de saída quando a carga zero é aplicada
- FOE: Saída de fundo de escala, a diferença no sinal de saída da pressão de fundo de escala até o ponto zero
- BFSLNL: Não linearidade em relação à linha reta de melhor ajuste
Características do Sensor e Análise de Erros
A seguir, damos uma olhada detalhada em uma pressão média de 40kPa sensor de pressão piezoresistente da marca WF. Após embalagem, calibração e compensação de temperatura usando um módulo de pressão de aço inoxidável 316L, os parâmetros são os seguintes:

Os dados na tabela (por exemplo, ±1% FS, etc.) são geralmente a precisão final obtida “após calibração/compensação”, que já corrigiu a maioria dos erros de temperatura repetíveis, erros de ganho, polarização zero, etc. O verdadeiro desvio “não calibrado” geralmente leva em consideração vários tipos de dispersão, incluindo ponto zero inicial, sensibilidade, tensão do pacote, etc., que pode facilmente somar mais de ±10% FS.
O verdadeiro “não calibrado”O desvio geralmente leva em consideração vários tipos de dispersão, incluindo zero inicial, sensibilidade, tensão do pacote, etc., que podem facilmente somar mais de ± 10% FS.
Portanto, muitos fabricantes listam apenas a precisão combinada calibrada ou compensada (por exemplo, 1% FS, 2% FS) em seu “especificações finais” e não indicam diretamente na ficha técnica do produto final quanto ±% erro FS o "original o”pode ter.
Fatores que influenciam o erro
As influências de erro típicas incluem referência erros de tensão, erros do amplificador, erros de sensor, e o efeito de barulho na precisão da medição.
(1) Erro de tensão de referência
A tensão de referência é usada para comparar com o valor de medição real, portanto, o valor real desta tensão de referência é muito importante e é necessária calibração periódica ou calibração de software da tensão de referência para corrigir esse erro básico de medição. Um coeficiente de temperatura de 100 ppm/°C entre 0°C e 25°C terá um erro de até 2.500 ppm, ou 0,25% da faixa completa da escala.
(2) Erro do amplificador
Os amplificadores operacionais podem introduzir erros devido ao desvio zero fora de fase e outros motivos. Amplificador operacional de entrada de sinal do sensor que afetará a precisão da medição. Tais como sensores de pressão, sensores de pressão, por exemplo, um sinal de escala completa de 20mV terá um deslocamento de 5%, ou seja, tensão de polarização de entrada de 1mV. Este erro de polarização de entrada pode reduzir diretamente a precisão da medição, com faixa dinâmica suficiente do conversor A/D é possível usar software para eliminar esse erro.
(3) Erro do sensor
É improvável que os sensores atinjam um estado ideal devido ao processamento e podem ocorrer erros. Pode ser difícil corrigir erros do sensor. Por exemplo, no caso de sensores de pressão, mesmo que sejam calibrados linearmente durante o processo de fabricação, a quantidade de variação no fator de escala de saída entre diferentes dispositivos na aplicação ainda é alta. A tensão de referência do sensor de pressão é geralmente gerada pela excitação, que produz um método de medição proporcional através de uma ponte Whiston, que elimina o erro de desvio até certo ponto, mas ainda haverá uma tensão de polarização gerada porque a ponte não pode ser completamente simétrica entre si. Tomando como exemplo o sensor de pressão, o deslocamento de 1 sensor de baixa pressão, seu erro de polarização é causado em grande parte pela assimetria da ponte.
(4) Efeitos de ruído
O ruído tem muitas fontes, incluindo ruído acoplado de circuitos lógicos digitais de alta velocidade próximos, fontes de alimentação, motores de ventiladores, válvulas solenóides e RF EMI. O ruído pode ser reduzido através de um projeto de aterramento adequado, métodos de blindagem e layout da placa. Além disso, podem ser selecionados amplificadores operacionais que minimizem o ruído introduzido e tenham largura de banda de ganho suficiente. Os amplificadores operacionais podem ser avaliados com base na quantidade de ruído introduzido, que é determinada a partir de medições de sinais em uma largura de banda irrestrita (largura de banda larga) ou em uma largura de banda definida.
Conversores A/D
Ao usar um conversor A/D, o ruído de fundo é um fator determinante na precisão da medição disponível. Quando um dispositivo é classificado para resolução de 24 bits, a precisão real alcançada pelo conversor geralmente é menor devido às limitações causadas pelo ruído. Uma distinção precisa ser feita aqui entre o bit efetivo e o valor de ruído muito baixo, onde a especificação do bit efetivo é calculada a partir do valor RMS do nível de ruído, e o valor de ruído muito baixo é baseado no valor pico a pico, que normalmente corresponde a até 6,6 vezes o valor RMS estatístico. Portanto, a especificação de ruído muito baixo indica a resolução efetiva do conversor, que permanece estável em bits LSB acima do ruído de fundo. Atenção especial também precisa ser dada às limitações nas especificações, como a tensão de referência e a faixa de entrada, que podem variar de aplicação para aplicação, e as promessas da folha de dados podem diferir consideravelmente da relação real.
Amplificadores Operacionais
É difícil para um amplificador atingir baixo ruído e alto ganho ao mesmo tempo. É então necessário colocar o nível de ruído do amplificador na mesma faixa do seu erro. Todos os amplificadores semicondutores possuem ruído 1/f, também conhecido como ruído de cintilação, que é um fenômeno fundamental devido ao material. Ao contrário da frequência, abaixo de um ponto de inflexão de ruído específico, a densidade do ruído aumenta exponencialmente e torna-se muito grande em baixas frequências. Poucos amplificadores podem realizar esta combinação de características de baixo ruído e alto ganho em um único chip a baixo custo.
Para obter baixo ruído e alto ganho, circuitos multiamplificadores híbridos podem ser projetados, usando uma combinação de amplificadores de entrada com alta impedância de entrada, circuito de correção de erros de entrada e um segundo (ou terceiro) amplificador de compensação para atingir o ganho desejado. Amplificadores que se concentram em um parâmetro geralmente apresentam sérios problemas em outras áreas.
Considerações Finais
É por isso que, em aplicações práticas, se comprarmos diretamente um matriz não calibrada ou simplesmente embalado sensor de pressão piezoresistivo e lidarmos nós mesmos com o projeto do circuito e a compensação de temperatura, podemos enfrentar um deslocamento inicial significativo. Contudo, se comprarmos um compensado/calibrado digitalmente sensor de pressão ou transmissor com compensação integrada, podemos alcançar diretamente o erro geral menor (como ±1% FS) indicado na folha de dados.
A introdução acima apenas arranha a superfície das aplicações da tecnologia de sensores de pressão. Continuaremos a explorar os diferentes tipos de elementos sensores usados em vários produtos, como funcionam e suas vantagens e desvantagens. Se desejar mais detalhes sobre o que é discutido aqui, você pode verificar o conteúdo relacionado posteriormente neste guia. Se você está sem tempo, também pode clicar aqui para baixar os detalhes deste guia Dados PDF do produto do sensor de pressão de pressão de ar.
Para obter mais informações sobre outras tecnologias de sensores, por favor Visite nossa página de sensores.


