En general, antes del procesamiento digital, sensores de presión a menudo describe características como histéresis (presión, temperatura), linealidad, coeficiente de temperaturay otros parámetros característicos en las especificaciones del producto. Sin embargo, después del procesamiento digital, los sensores o transmisores de presión generalmente ya no describen estos indicadores de parámetros al detallar las características de la señal de salida; en cambio, proporcionan parámetros generales de precisión de medición. Esta diferencia no se debe a que el procesamiento digital pueda eliminar características como la histéresis, sino a que después del procesamiento digital resulta difícil distinguir si ciertas características como la histéresis son causadas por la señal de medición del elemento sensor o por el procesamiento del firmware en sí. Por lo tanto, generalmente es más razonable combinar los errores de medición causados por histéresis, las características de temperatura y el proceso de cuantificación en las especificaciones finales de precisión, error y estabilidad a largo plazo de la medición del producto.
Catalogar
Errores de sensor
Mientras exista medición, inevitablemente habrá errores. Para aplicaciones específicas, incluso si existen errores, son relativos en cierto sentido. Siempre que el error esté dentro de un rango aceptable, puede tolerarse y los usuarios profesionales generalmente siguen el principio de «suficiencia, luego preferencia» al seleccionar sensores. En aplicaciones de sensores de presión, las características de interés incluyen, entre otras, las siguientes:
- Rango de medición de presión: FSO-kPa (presión diferencial/presión estática, presión manométrica/presión manométrica sellada, presión absoluta)
· Error de medición de presión: ± kPa
· Resolución de medición: kPa/bit
· Voltaje de funcionamiento/corriente
· Rango de temperatura de almacenamiento y operación, medio de medición
· Características de la respuesta a presión, repetibilidad, estabilidad a largo plazo

Debajo de estos parámetros de presión se encuentra el núcleo o módulo del sensor que puede convertir la presión en una señal eléctrica. Existen múltiples principios para medir la presión, pero no todos los principios pueden cubrir todos los tipos y rangos de presión. Estos principios incluyen:
- Piezoresistivo
- Película delgada pulverizada
- Silicon Resonant
- Capacitivo
- Corriente de Eddy
- Equilibrio de fuerzas, tubo Bourdon de cuarzo fundido
- Calibre …
A continuación se muestra un breve análisis de errores para los sensores de presión basados en el piezoresistivo principio.
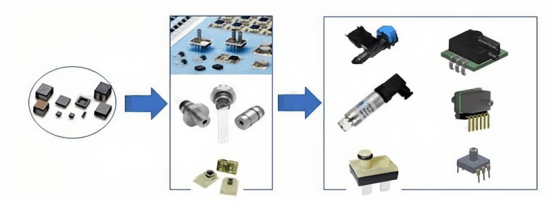
Cifra-1: De chip de silicio a Varias aplicaciones de embalaje de sensores de presión piezoresistiva
En la Figura-1, se enumeran varios formularios típicos que se utilizan ampliamente en diversos campos según sensores de presión piezoresistiva desde troqueles desnudos hasta varios tipos de embalaje. Algunos tipos de productos sólo tienen embalaje externo; algunos tienen salidas de señales analógicas dentro del rango correspondiente con temperatura compensada y calibradas para intercambiabilidad; algunos amplifican aún más la señal analógica; y otros realizan procesamiento digital antes de la salida. También hay transmisores de presión que, después de la calibración digital, utilizan los protocolos de interfaz correspondientes que se aplican ampliamente en la industria, así como módulos integrados que incluyen otros sensores como sensores de temperatura o gas para la industria automotriz, médica y otras industrias. Además, algunos dispositivos utilizan las características de presión del medio que se mide para determinar otras cantidades físicas (por ejemplo, sensores de flujo basados en baja presión). sensores de presión diferenciales utilizado en ventiladores.
En términos generales, antes del procesamiento digital, sensores de presión a menudo describe características como histéresis (presión, temperatura), linealidad, y coeficiente de temperatura en sus secciones de especificaciones. Sin embargo, después del procesamiento digital, los sensores o transmisores de presión generalmente no describen estos indicadores al detallar las características de la señal de salida, sino que proporcionan información general. precisión de la medición parámetros. Esta diferencia no se debe a que el procesamiento digital pueda eliminar características como histéresis, sino porque después del procesamiento digital resulta difícil distinguir si las características (por ejemplo, histéresis) son causadas por la señal de medición del elemento sensor o por el procesamiento del firmware en sí. Por lo tanto, los errores de medición causados por histéresis y las características de temperatura, junto con los errores de cuantificación, generalmente se combinan en las especificaciones del producto final para precisión de la medición, error y estabilidad a largo plazo.
El condicionamiento digital rara vez aborda la simetría del puente sensor. Si se considera el efecto de la compensar distribución en el punto de carga cero de un sensor de presión piezoresistiva En la ganancia del circuito de amplificación frontal, así como en el impacto del ADC posterior en la resolución de la señal efectiva (FSO) debido a las variaciones de ganancia, se requiere un enfoque integral. Después del procesamiento digital, a menos que sea necesario, el compensar se calcula a partir del punto cero especificado.
La compensación y calibración analógicas, antes de que el ADC participe en el procesamiento, pueden mejorar significativamente la intercambiabilidad del producto al mejorar la simetría (punto 0). compensar salida acercándose a 0V), sensibilidad a la temperaturay consistencia de la salida. Por tanto, ambos métodos tienen sus características. En el análisis de errores posterior de los sensores de presión, solo se analizarán los productos de presión que se han sometido a compensación de temperatura y calibración utilizando redes de resistencias, en lugar de aquellos después del procesamiento digital.
Basado en las características de sensores de presión piezoresistiva, el tratamiento de errores generalmente se divide en dos tipos:
- Errores compensables (generalmente causados por efectos de temperatura y son repetibles)
- Errores no compensables (generalmente causado por la presión, la temperatura y el estrés del embalaje, y no son repetibles)
Por supuesto, incluso para la parte compensable del error, diferentes métodos de compensación pueden lograr diversos grados de cancelación del error.
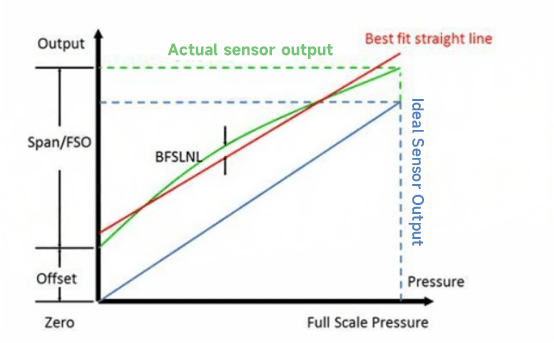
Cifra-2: Comparación de la salida características (verde) de un sensor de presión piezoresistivo en una fijado temperatura con el sensor de presión ideal producción (azul)
Para el análisis de error posterior, la Figura 2 muestra las características generales de salida de un sensor de presión piezoresistiva. Los términos utilizados en la figura son los siguientes:
- Cero: Punto cero de referencia ideal
- Compensar: Desviación real de salida sin carga, es decir, el voltaje de salida cuando se aplica carga cero
- FSO: Salida de escala completa, la diferencia en la señal de salida desde la presión de escala completa hasta el punto cero
- Bfslnl: No linealidad relativa a la línea recta de mejor ajuste
Características del sensor y análisis de errores
A continuación, echamos un vistazo detallado a una presión media de 40 kPa. sensor de presión piezoresistiva de la marca WF. Después del embalaje, calibración y compensación de temperatura Usando un módulo de presión de acero inoxidable 316L, los parámetros son los siguientes:

Los datos de la tabla (por ejemplo, ±1% FS, etc.) suelen ser la precisión final obtenida "después de la calibración/compensación"., que ya ha corregido la mayoría de los errores de temperatura repetibles, errores de ganancia, polarización cero, etc. La verdadera desviación "no calibrada" a menudo tiene en cuenta varios tipos de dispersión, incluido el punto cero inicial, la sensibilidad, la tensión del paquete, etc., que pueden sumar fácilmente más de ±10% FS.
Lo verdadero "no calibradoLa desviación a menudo tiene en cuenta varios tipos de dispersión, incluido el cero inicial, la sensibilidad, la tensión del paquete, etc., que pueden sumar fácilmente más de ±10% FS.
Por lo tanto, muchos fabricantes solo enumeran la precisión combinada calibrada o compensada (p. ej., 1% FS, 2% FS) en su “especificaciones finales"Y no indique directamente en la hoja de datos del producto final cuánto ±% FS Error el "Original el” puede haberlo hecho.
Factores de influencia de errores
Las influencias de error típicas incluyen referencia errores de voltaje, Errores de amplificador, errores de sensor, y el efecto de ruido sobre la precisión de la medición.
(1) Error de voltaje de referencia
El voltaje de referencia se utiliza para comparar con el valor de medición real, por lo que el valor real de este voltaje de referencia es muy importante y se requiere una calibración periódica o una calibración de software del voltaje de referencia para corregir este error de medición básico. Un coeficiente de temperatura de 100 ppm/°C entre 0°C y 25°C tendrá un error de hasta 2500 ppm, o 0,25% del rango de escala completa.
(2) Error del amplificador
Los amplificadores operacionales pueden introducir errores debido a su desviación del cero fuera de fase y otras razones. Amplificador operacional de entrada de señal del sensor que afectará la precisión de la medición. Como sensores de presión, sensores de presión, por ejemplo, una señal de escala completa de 20 mV tendrá una compensación del 5%, es decir, un voltaje de polarización de entrada de 1 mV. Este error de polarización de entrada puede reducir directamente la precisión de la medición; con suficiente rango dinámico del convertidor A/D es posible utilizar software para eliminar este error.
(3) Error del sensor
Es poco probable que los sensores alcancen un estado ideal debido al procesamiento y pueden ocurrir errores. Puede resultar difícil corregir los errores del sensor. Por ejemplo, en el caso de los sensores de presión, incluso si se calibran linealmente durante el proceso de fabricación, la cantidad de variación en el factor de escala de salida entre diferentes dispositivos en la aplicación sigue siendo alta. El voltaje de referencia del sensor de presión generalmente es generado por la excitación, lo que produce un método de medición proporcional a través de un puente Whiston, que elimina el error de deriva hasta cierto punto, pero aún se generará un voltaje de polarización porque el puente no puede ser completamente simétrico entre sí. Tomando el sensor de presión como ejemplo, el desplazamiento de 1 sensor de baja presión, su error de polarización se debe en gran medida a la asimetría del puente.
(4) Efectos de ruido
El ruido tiene muchas fuentes, incluido el ruido acoplado de circuitos lógicos digitales de alta velocidad cercanos, fuentes de alimentación, motores de ventiladores, válvulas solenoides y EMI de RF. El ruido se puede reducir mediante un diseño de conexión a tierra, métodos de blindaje y disposición de la placa adecuados. Además, se pueden seleccionar amplificadores operacionales que minimicen el ruido introducido y tengan suficiente ancho de banda de ganancia. Los amplificadores operacionales se pueden evaluar en función de la cantidad de ruido introducido, que se determina a partir de mediciones de señales en un ancho de banda ilimitado (ancho de banda amplio) o en un ancho de banda definido.
Convertidores A/D
Cuando se utiliza un convertidor A/D, el ruido de fondo es un factor determinante en la precisión de medición disponible.. Cuando un dispositivo está clasificado para una resolución de 24 bits, la precisión real lograda por el convertidor suele ser menor debido a las limitaciones causadas por el ruido. Es necesario hacer una distinción aquí entre el bit efectivo y el valor de ruido muy bajo, donde la especificación del bit efectivo se calcula a partir del valor RMS del nivel de ruido, y el valor de ruido muy bajo se basa en el valor pico a pico, que normalmente corresponde hasta 6,6 veces el valor RMS estadístico. Por lo tanto, la especificación de muy bajo ruido indica la resolución efectiva del convertidor, que permanece estable en bits LSB por encima del ruido de fondo. También se debe prestar especial atención a las limitaciones de la especificación, como el voltaje de referencia y el rango de entrada, que pueden variar de una aplicación a otra, y las promesas de la hoja de datos pueden diferir considerablemente de la relación real.
Amplificadores operativos
Es difícil para un amplificador alcanzar el bajo ruido y la alta ganancia al mismo tiempo. Entonces es necesario llevar el nivel de ruido del amplificador al mismo rango que su error. Todos los amplificadores de semiconductores tienen ruido 1/f, también conocido como ruido de parpadeo, que es un fenómeno fundamental debido al material. A diferencia de la frecuencia, por debajo de un punto de inflexión del ruido específico, la densidad del ruido aumenta exponencialmente y se vuelve muy grande a bajas frecuencias. Pocos amplificadores pueden lograr esta combinación de características de bajo ruido y alta ganancia en un solo chip a bajo costo.
Para lograr bajo ruido y alta ganancia, se pueden diseñar circuitos híbridos de múltiples amplificadores, utilizando una combinación de amplificadores de entrada con una alta impedancia de entrada, circuitos de corrección de errores de entrada y un segundo (o tercer) amplificador de compensación para lograr la ganancia deseada. Los amplificadores que se concentran en un parámetro suelen presentar problemas graves en otras áreas.
Pensamientos finales
Es por esto que, en aplicaciones prácticas, si compramos directamente un moreno no calibrado o simplemente empaquetado sensor de presión piezoresistivo y manejar el diseño del circuito y la compensación de temperatura nosotros mismos, podemos enfrentarnos a un desplazamiento inicial significativo. Sin embargo, si compramos un compensado digitalmente/calibrado Sensor de presión o transmisor con compensación incorporada, podemos lograr directamente el error general más pequeño (como ±1% FS) indicado en la hoja de datos.
La introducción anterior sólo toca la superficie de las aplicaciones de la tecnología de sensores de presión. Continuaremos explorando los diferentes tipos de elementos sensores utilizados en diversos productos, cómo funcionan y sus ventajas y desventajas. Si desea obtener más detalles sobre lo que se analiza aquí, puede consultar el contenido relacionado más adelante en esta guía. Si tiene poco tiempo, también puede hacer clic aquí para descargar los detalles de estas guías. Producto del sensor de presión de aire datos PDF.
Para obtener más información sobre otras tecnologías de sensores, por favor Visite nuestra página de sensores.